


GATE 2024 Instrumentation Engineering Question Paper PDF is available here. IISc Banglore conducted GATE 2024 Instrumentation Engineering exam on February 4 in the Afternoon Session from 2:30 PM to 5:30 PM. Students have to answer 65 questions in GATE 2024 Instrumentation Engineering Question Paper carrying a total weightage of 100 marks. 10 questions are from the General Aptitude section and 55 questions are from Engineering Mathematics and Core Discipline.
GATE 2024 Instrumentation Engineering Question Paper with Answer Key PDF
| GATE 2024 Instrumentation Engineering Question Paper with Answer Key | Download PDF | Check Solutions |

GATE 2024 Instrumentation Engineering Question Paper Solution
If ‘\(\rightarrow\)’ denotes increasing order of intensity, then the meaning of the words
\(\text{[drizzle \(\rightarrow\) rain \(\rightarrow\) downpour]}\) is analogous to \(\text{[ _____ \(\rightarrow\) quarrel \(\rightarrow\) feud]}\)
Which one of the given options is appropriate to fill the blank?
View Solution
Step 1: Understanding the pattern of intensity
The given sequence \([ drizzle \rightarrow rain \rightarrow downpour ]\) represents an increasing intensity of precipitation. Similarly, the sequence \([ \_\_\_\_\_ \rightarrow quarrel \rightarrow feud ]\) must represent an increasing intensity of disagreement.
Step 2: Analyzing the options
- Bicker: A light or petty argument, which can escalate into a quarrel and further into a feud.
- Bog: A swampy area, unrelated to verbal conflicts.
- Dither: Indecisiveness, unrelated to arguments.
- Dodge: To evade something, also unrelated to arguments.
Step 3: Selecting the correct answer
The correct term that fits the pattern of increasing intensity in a conflict is ``bicker", as bickering leads to a quarrel, which may further escalate into a feud. Quick Tip: When solving analogy-based questions, always look for a logical progression in meaning and intensity. Identify the weakest and strongest terms in the given set and match them to similar progressions.
Statements:
1. All heroes are winners.
2. All winners are lucky people.
Inferences:
I. All lucky people are heroes.
II. Some lucky people are heroes.
III. Some winners are heroes.
Which of the above inferences can be logically deduced from statements 1 and 2?
View Solution
Logical Deduction:
Statement Analysis:
From the statements, we can deduce the following relationships:
- All heroes are winners (Statement 1).
- All winners are lucky people (Statement 2).
Analysis of Inferences:
I. All lucky people are heroes.
- This inference suggests a reversal of Statement 2, implying that all elements of the lucky group are within the heroes group, which is not supported by the statements. Incorrect.
II. Some lucky people are heroes.
- Since all heroes are winners and all winners are lucky, it follows logically that some lucky people (at least those who are winners and thus heroes) are indeed heroes. Correct.
III. Some winners are heroes.
- Directly follows from Statement 1, where it is established that all heroes are winners, hence, at least some winners are heroes. Correct.
Thus, the correct inferences, based on the given statements, are II and III. Quick Tip: When dealing with logical deductions, especially in syllogisms, pay attention to the direction and scope of the categorical statements to correctly interpret possible valid conclusions.
A student was supposed to multiply a positive real number \( p \) with another positive real number \( q \). Instead, the student divided \( p \) by \( q \). If the percentage error in the student’s answer is 80%, the value of \( q \) is:
View Solution
Step 1: Define the correct and incorrect operations.
The correct operation was supposed to be: \[ p \times q \]
Instead, the operation performed was: \[ \frac{p}{q} \]
Step 2: Establish the formula for the percentage error.
The percentage error is calculated based on the difference between the true value and the incorrect value, expressed as a percentage of the true value: \[ Percentage Error = \left(\frac{True Value - Incorrect Value}{True Value}\right) \times 100% \]
Substituting the operations: \[ 80% = \left(\frac{p \times q - \frac{p}{q}}{p \times q}\right) \times 100% \]
Step 3: Simplify and solve for \( q \).
Simplify the equation: \[ 0.8 = 1 - \frac{1}{q^2} \quad \Rightarrow \quad \frac{1}{q^2} = 0.2 \quad \Rightarrow \quad q^2 = 5 \quad \Rightarrow \quad q = \sqrt{5} \] Quick Tip: When dealing with percentage errors in mathematical operations, always ensure to express the error relative to the correct operation's outcome to find the variable accurately.
If the sum of the first 20 consecutive positive odd numbers is divided by 20\(^2\), the result is:
View Solution
Step 1: Calculate the sum of the first 20 consecutive positive odd numbers.
The sum of the first \( n \) odd numbers is given by the formula: \[ Sum = n^2 \]
For the first 20 odd numbers: \[ Sum = 20^2 = 400 \]
Step 2: Divide the sum by 20\(^2\). \[ Result = \frac{400}{20^2} = \frac{400}{400} = 1 \]
Therefore, the result of dividing the sum of the first 20 consecutive positive odd numbers by 20\(^2\) is 1. Quick Tip: Remember, the sum of the first \( n \) odd numbers squared gives the result \( n^2 \), which simplifies calculations in problems involving consecutive odd numbers.
The ratio of the number of girls to boys in class VIII is the same as the ratio of the number of boys to girls in class IX. The total number of students (boys and girls) in classes VIII and IX is 450 and 360, respectively. If the number of girls in classes VIII and IX is the same, then the number of girls in each class is:
View Solution
Step 1: Let the number of girls in each class be \( g \), and the ratios be represented as \( \frac{g}{b_{VIII}} = \frac{b_{IX}}{g} \), where \( b_{VIII} \) and \( b_{IX} \) are the number of boys in class VIII and IX, respectively.
Step 2: Set up the equations based on the total numbers and ratios.
For class VIII: \[ g + b_{VIII} = 450 \]
For class IX: \[ g + b_{IX} = 360 \]
Step 3: Express the boys in terms of girls using the ratio relationship: \[ \frac{g}{b_{VIII}} = \frac{b_{IX}}{g} \Rightarrow g^2 = b_{VIII} \times b_{IX} \]
Step 4: Substitute the boys from the total number in each class: \[ g^2 = (450 - g)(360 - g) \]
Expand and simplify the quadratic equation: \[ g^2 = 162000 - 810g + g^2 \Rightarrow 810g = 162000 \Rightarrow g = 200 \]
Therefore, the number of girls in each class is 200. Quick Tip: In problems involving ratios and total counts, convert ratios into linear equations to simplify the calculation. This method provides a clear path to solve for unknowns systematically.
In the given text, the blanks are numbered (i)–(iv). Select the best match for all the blanks.
Yoko Roi stands __(i)__ as an author for standing __(ii)__ as an honorary fellow, after she stood __(iii)__ her writings that stand __(iv)__ the freedom of speech.
View Solution
Step 1: Determine the correct prepositions to complete the sentences meaningfully.
Analysis of the sentence structure and appropriate prepositions:
- (i) out: "stands out" is a common phrase meaning to be noticeably excellent or prominent.
- (ii) down: "standing down" typically means resigning or stepping down from a position, which fits the context of becoming an honorary fellow.
- (iii) by: "stood by" means to support or remain committed to, which in this context relates to her writings.
- (iv) for: "stand for" implies advocating or supporting, appropriate for describing a stance on the freedom of speech.
The correct option that fits grammatically and contextually with the sentences is (D), fulfilling the nuances of the expressions used. Quick Tip: When choosing prepositions for sentence completions, consider common idiomatic expressions and the logical continuity between the clauses they connect.
Seven identical cylindrical chalk-sticks are fitted tightly in a cylindrical container. The figure below shows the arrangement of the chalk-sticks inside the cylinder.

The length of the container is equal to the length of the chalk-sticks. The ratio of the occupied space to the empty space of the container is.
View Solution
Step 1: Establish the packing configuration.
The seven chalk-sticks are arranged in a hexagonal packing configuration with one chalk-stick at the center and six surrounding it. Each chalk-stick is cylindrical with a radius \( r \).
Step 2: Calculate the diameter of the container.
The diameter of the container is four radii across (diameter of three in line and touching chalk-sticks plus one radius on each side): \[ D = 4r \]
Step 3: Calculate the area of the container.
The container's base area \( A_C \) is: \[ A_C = \pi \left(\frac{4r}{2}\right)^2 = 4\pi r^2 \]
Step 4: Calculate the total volume of the chalk-sticks.
Volume of one chalk-stick \( V_s \) is: \[ V_s = \pi r^2 h \]
where \( h = 4r \) (since the container's height equals the length of the chalk-sticks). Total volume for seven sticks: \[ V_{total} = 7 \pi r^2 \cdot 4r = 28\pi r^3 \]
Step 5: Calculate the volume of the container. \[ V_C = A_C \times h = 4\pi r^2 \cdot 4r = 16\pi r^3 \]
Step 6: Determine the ratio of the occupied volume to the empty volume.
Empty space volume \( V_E \): \[ V_E = V_C - V_{total} = 16\pi r^3 - 28\pi r^3 = -12\pi r^3 \]
Since we need a positive value: \[ V_E = 12\pi r^3 \]
The ratio of occupied to empty space: \[ Ratio = \frac{V_{total}}{V_E} = \frac{28\pi r^3}{12\pi r^3} = \frac{28}{12} = \frac{7}{2} \] Quick Tip: In packing problems, consider the geometrical arrangement and use symmetry to simplify calculations. The volume of space each item occupies is crucial for determining how they fit within a container.
The plot below shows the relationship between the mortality risk of cardiovascular disease and the number of steps a person walks per day. Based on the data, which of the following options is true?

View Solution
Step 1: Examine the slope of the risk curve at various intervals.
The graph shows a steep decline in risk from 0 to 5000 steps, indicating a significant reduction in mortality risk of cardiovascular disease as initial activity levels increase.
Step 2: Compare the rate of change in risk across different step intervals. \[ - From 0 to 5000 steps/day, the curve drops sharply. \] \[ - Beyond 5000 steps/day, the curve's descent is less steep. \]
The most substantial decline per 5000 steps is clearly in the first interval from 0 to 5000 steps.
Step 3: Validate against the options.
Given that the steepest portion of the curve is between 0 and 5000 steps/day, the largest risk reduction for any 5000 step increment within the available data indeed occurs in this initial segment.
This observation supports that the earliest increments in physical activity yield the most significant benefits in reducing cardiovascular disease risk, confirming option (C) as correct. Quick Tip: In analyzing health-related data, identifying intervals with the greatest changes can inform effective recommendations for behavior changes that have the most substantial impact on health outcomes.
Five cubes of identical size and another smaller cube are assembled as shown in Figure A. If viewed from direction X , the planar image of the assembly appears as Figure B .

Figure A shows a stacked arrangement of five identical cubes and one smaller cube. When viewed from direction Y, the planar image needs to reflect the relative positions and visible surfaces of the cubes.
(A) 
(B) 
(C) 
(D) 
View Solution
Step 1: Identify the visible cubes from direction Y.
The cubes are stacked such that from direction Y:
- The top cube in the center (smaller cube) is visible.
- The front three cubes form the base, and one cube is visible behind these three.
Step 2: Determine the configuration of visible cubes.
From direction Y, the smaller cube appears above the center of the three base cubes, with another cube visible behind the central base cube.
Step 3: Compare with the provided options.
Option (A) accurately depicts this configuration, where the smaller cube is shown above the middle cube of a three-cube base, with one additional cube visible behind the central cube.
The smaller cube is offset above the center cube in the base row.
The additional cube behind the central base cube completes the shape as shown in option (A).
Thus, the planar image from direction Y corresponds to option (A) based on the spatial arrangement and visibility of the cubes from that angle. Quick Tip: When visualizing geometric objects from different perspectives, consider the line of sight and occlusion of objects behind others to determine which surfaces and edges are visible.
Visualize a cube that is held with one of the four body diagonals aligned to the vertical axis. Rotate the cube about this axis such that its view remains unchanged. The magnitude of the minimum angle of rotation is:
View Solution
Step 1: Understand the geometry of the cube.
A body diagonal of a cube connects opposite vertices and passes through the center of the cube, intersecting six faces at their centroids.
Step 2: Consider the rotation about the body diagonal.
When a cube is rotated around a body diagonal, to maintain the same visual appearance from the initial position, the rotation must bring vertices to positions occupied by other vertices in the original view.
Step 3: Determine the minimum angle of rotation.
For a body diagonal, the cube has rotational symmetry of order three around this axis (120\(^\circ\), 240\(^\circ\), and 360\(^\circ\)). The minimum angle that maps every vertex to another vertex's position is 120\(^\circ\).
This rotation of 120\(^\circ\) around the body diagonal is the minimum angle that preserves the visual appearance of the cube. Quick Tip: When analyzing symmetrical properties of regular shapes like cubes, consider their inherent geometrical symmetries such as rotations around axes through the center, which can greatly simplify solving such visualization problems.
Let \( z = x + iy \) be a complex variable and \( \overline{z} \) be its complex conjugate. The equation \( \overline{z}^2 + z^2 = 2 \) represents a:
View Solution
Step 1: Represent \( z \) and \( \overline{z} \) in terms of \( x \) and \( y \).
Let \( z = x + iy \), where \( x \) and \( y \) are real numbers, and \( \overline{z} = x - iy \) is the complex conjugate of \( z \). Then: \[ z^2 = (x + iy)^2 = x^2 - y^2 + 2ixy, \quad \overline{z}^2 = (x - iy)^2 = x^2 - y^2 - 2ixy. \]
Step 2: Add \( \overline{z}^2 \) and \( z^2 \).
\[ \overline{z}^2 + z^2 = (x^2 - y^2 - 2ixy) + (x^2 - y^2 + 2ixy) = 2(x^2 - y^2). \]
Step 3: Use the given equation.
The equation \( \overline{z}^2 + z^2 = 2 \) becomes: \[ 2(x^2 - y^2) = 2 \quad \Rightarrow \quad x^2 - y^2 = 1. \]
Step 4: Interpret the equation.
The equation \( x^2 - y^2 = 1 \) represents a standard hyperbola.
Final Answer: \( \mathbf{(B)} \, Hyperbola \) Quick Tip: For equations involving complex variables, separate the real and imaginary parts by substituting \( z = x + iy \). This helps to interpret the geometrical meaning of the equation.
The pressure drop across a control valve is constant. The control valve with inherent characteristic has decreasing sensitivity. If \( x \) represents the fraction of maximum stem position of the control valve, then the function \( f(x) \) representing the fraction of maximum flow is:
View Solution
Step 1: Understanding the problem.
The problem states that the control valve exhibits decreasing sensitivity. This means that for a given change in the stem position (\( x \)), the corresponding change in the flow fraction (\( f(x) \)) decreases as \( x \) increases.
Step 2: Determine the relationship.
Decreasing sensitivity implies that the flow fraction \( f(x) \) increases at a decreasing rate as \( x \) increases. Mathematically, this behavior can be modeled by a square root function: \[ f(x) = \sqrt{x}. \]
Step 3: Verify other options.
- Option (A): \( \alpha x^{-1} \): This represents an inverse relationship, which does not match the problem's description.
- Option (C): \( x \): This represents a linear relationship, which does not exhibit decreasing sensitivity.
- Option (D): \( x^2 \): This represents an increasing sensitivity, which is opposite to the given characteristic.
Final Answer: \( \mathbf{(B)} \, \sqrt{x} \) Quick Tip: For control valve problems, decreasing sensitivity often corresponds to non-linear relationships like \( \sqrt{x} \), while increasing sensitivity corresponds to \( x^2 \).
A discrete-time sequence is given by \( x[n] = [1, 2, 3, 4] \) for \( 0 \leq n \leq 3 \). The zero-lag auto-correlation value of \( x[n] \) is:
View Solution
Step 1: Definition of zero-lag auto-correlation.
The zero-lag auto-correlation of a sequence \( x[n] \) is given by: \[ R_x(0) = \sum_{n=0}^{N-1} x[n] \cdot x[n], \]
where \( N \) is the length of the sequence.
Step 2: Calculate \( R_x(0) \).
For the given sequence \( x[n] = [1, 2, 3, 4] \): \[ R_x(0) = (1)^2 + (2)^2 + (3)^2 + (4)^2 \] \[ R_x(0) = 1 + 4 + 9 + 16 = 30. \]
Step 3: Verify the correct option.
The zero-lag auto-correlation value is \( 30 \), which matches option (D).
Final Answer: \( \mathbf{(D)} \, 30 \) Quick Tip: The zero-lag auto-correlation value is simply the sum of the squares of the elements in the sequence. Always square each term before summing.
Match the following measuring devices with their principle of measurement:

View Solution
Step 1: Understanding the principles of measurement.
Each device operates based on a unique principle:
- Optical pyrometer: Measures temperature by detecting the wavelength of radiated energy.
- Thermocouple: Generates an electromotive force due to the temperature difference between two dissimilar metals.
- Strain gauge: Measures strain by detecting a change in resistance.
- Linear variable differential transformer (LVDT): Measures displacement based on the variation in mutual inductance.
Step 2: Matching the devices to their principles.
From the explanation above: \[ (P) Optical pyrometer \to (III) Wavelength of radiated energy \] \[ (Q) Thermocouple \to (IV) Electromotive force generated by two dissimilar metals \] \[ (R) Strain gauge \to (II) Change in resistance \] \[ (S) Linear variable differential transformer \to (I) Variation in mutual inductance \]
Step 3: Verifying the correct option.
The correct matching corresponds to option (A): \[ (P) - (III), (Q) - (IV), (R) - (II), (S) - (I). \]
Final Answer: \( \mathbf{(A)} \) Quick Tip: When solving matching questions, focus on the fundamental working principles of the devices and align them systematically to avoid confusion.
The capacitor shown in the figure has parallel plates, with each plate having an area \( A \). The thickness of the dielectric materials are \( d_1 \) and \( d_2 \) and their relative permittivities are \( \varepsilon_1 \) and \( \varepsilon_2 \), respectively. Assume that the fringing field effects are negligible and \( \varepsilon_0 \) is the permittivity of free space.

If \( d_1 \) is decreased by \( \delta d_1 \), the resultant capacitance becomes:
View Solution
The given capacitor consists of two dielectric materials in series. The total capacitance of a system with series dielectrics is given by: \[ C = \frac{\varepsilon_0 A}{d_1 + \frac{d_2}{\varepsilon_2}} \]
When \( d_1 \) is decreased by \( \delta d_1 \), the new thickness of the air gap becomes \( d_1 - \delta d_1 \). Substituting this into the formula for the capacitance: \[ C_{new} = \frac{\varepsilon_0 A}{(d_1 - \delta d_1) + \frac{d_2}{\varepsilon_2}} \]
Thus, the correct expression for the resultant capacitance is: \[ C_{new} = \frac{\varepsilon_0 A}{d_1 - \delta d_1 + \frac{d_2}{\varepsilon_2}} \]
Hence, the correct answer is (A). Quick Tip: When dealing with capacitors having multiple dielectric materials: Treat the system as a series combination of individual dielectric layers. The effective thickness is the sum of the physical thicknesses divided by their relative permittivities for each layer. Adjustments to any layer directly impact the overall capacitance, as shown in the formula.
Among the given options, the simplified form of the Boolean function \( F = (A + \overline{A}B) + \overline{A}(A + \overline{B})C \) is:
View Solution
Step 1: Expand the given expression.
The given Boolean function is: \[ F = (A + \overline{A}B) + \overline{A}(A + \overline{B})C \]
Expand \( \overline{A}(A + \overline{B})C \): \[ \overline{A}(A + \overline{B})C = \overline{A} \cdot A \cdot C + \overline{A} \cdot \overline{B} \cdot C \]
Using \( \overline{A} \cdot A = 0 \), this reduces to: \[ \overline{A}(A + \overline{B})C = \overline{A} \cdot \overline{B} \cdot C \]
Thus, the function becomes: \[ F = (A + \overline{A}B) + \overline{A} \cdot \overline{B} \cdot C \]
Step 2: Simplify \( A + \overline{A}B \).
Using the Absorption Law, \( A + \overline{A}B = A + B \).
Now, the function becomes: \[ F = (A + B) + \overline{A} \cdot \overline{B} \cdot C \]
Step 3: Combine terms to simplify further.
Using the Distributive Property: \[ F = A + B + \overline{A} \cdot \overline{B} \cdot C \]
Observe that \( \overline{A} \cdot \overline{B} \cdot C \) does not affect \( A + B \) because \( A + B \) already dominates all possible combinations. Hence: \[ F = A + B + C \]
Final Answer: \( \mathbf{(A)} \) Quick Tip: To simplify Boolean expressions: 1. Use the fundamental laws (e.g., Absorption, Distributive). 2. Break the expression into smaller parts for stepwise simplification. 3. Check for dominance rules where variables in "OR" operations can dominate smaller terms.
Consider the state-space representation of a system \[ \dot{x} = Ax + Bu \]
where \( x \) is the state vector, \( u \) is the input, \( A \) is the system matrix, and \( B \) is the input matrix. Choose the matrix \( A \) from the following options such that the system has a pole at the origin.


View Solution
Step 1: Understanding the problem statement.
The poles of the system are determined by the eigenvalues of the system matrix \( A \). For the system to have a pole at the origin, one of the eigenvalues of \( A \) must be 0.
Step 2: Computing the eigenvalues of the given matrices.
The characteristic equation for a matrix \( A \) is given by: \[ \det(A - \lambda I) = 0 \]
where \( \lambda \) represents the eigenvalues of \( A \).
Option (A):

The determinant of \( A - \lambda I \) is:

The roots of \( \lambda^2 + 3\lambda + 2 = 0 \) are \( \lambda = -1 \) and \( \lambda = -2 \). No eigenvalue is 0.
Option (B):
The determinant of \( A - \lambda I \) is:
Factoring, \( \lambda(\lambda - 4) = 0 \), which gives eigenvalues \( \lambda = 0 \) and \( \lambda = 4 \). Thus, this option has a pole at the origin.
Option (C):

The determinant of \( A - \lambda I \) is:

The roots are not 0, so no pole at the origin.
Option (D):

The determinant of \( A - \lambda I \) is:
The roots are \( \lambda = 1 \) and \( \lambda = 2 \). No eigenvalue is 0.
Step 3: Verifying the correct option.
From the calculations, only option (B) has an eigenvalue of 0. Hence, the correct answer is option (B).
Final Answer: \( \mathbf{(B)} \) Quick Tip: To determine poles of a system, calculate the eigenvalues of the system matrix \( A \). A pole at the origin corresponds to an eigenvalue of 0.
The sinusoidal transfer function corresponding to the polar plot shown in the figure, for \( T > 0 \), is:

View Solution
Step 1: Identify key features of the polar plot.
The given polar plot indicates that:
1. At \( \omega = 0 \), the transfer function magnitude is \( 1 \) (the point is at \( 1 \) on the real axis).
2. As \( \omega \to \infty \), the transfer function's real part becomes negative, indicating a decreasing linear term in the real component.
Step 2: Analyze the transfer function.
The transfer function can generally be represented as: \[ G(j\omega) = 1 - j\omega T \]
where \( T > 0 \) and \( \omega \) is the frequency.
Step 3: Validate behavior for \( \omega = 0 \) and \( \omega \to \infty \).
- At \( \omega = 0 \): \[ G(j\omega) = 1 - j(0)T = 1 \]
which matches the plot at \( \omega = 0 \).
- As \( \omega \to \infty \): \[ G(j\omega) = 1 - j\omega T \]
The imaginary part dominates, and the real part approaches \( -\infty \), which is consistent with the given plot.
Step 4: Eliminate other options.
- Option (B): \( \frac{1 - j\omega T}{1 + j\omega T} \) introduces a denominator, which does not match the observed behavior.
- Option (C): \( 1 + j\omega T \) has an increasing imaginary component, inconsistent with the plot.
- Option (D): \( \frac{1}{1 + j\omega T} \) produces a decreasing magnitude, inconsistent with the plot.
Conclusion:
The transfer function \( 1 - j\omega T \) correctly represents the polar plot.
Final Answer: \( \mathbf{(A)} \) Quick Tip: When analyzing polar plots, focus on the behavior at \( \omega = 0 \) and \( \omega \to \infty \). Ensure the transfer function's magnitude and phase align with the plot's characteristics.
A matrix \( M \) is constructed by stacking three column vectors \( v_1, v_2, v_3 \) as \[ M = [v_1 \ v_2 \ v_3]. \]
Choose the set of vectors from the following options such that \( rank(M) = 3 \):


View Solution
Step 1: Understanding the rank of a matrix.
The rank of a matrix is the maximum number of linearly independent columns (or rows). For \( rank(M) = 3 \), the three column vectors \( v_1, v_2, v_3 \) must be linearly independent.
Step 2: Checking linear independence of the options.
To verify linear independence, we check if the determinant of the \( 3 \times 3 \) matrix \( M \) formed by stacking \( v_1, v_2, v_3 \) is non-zero. If the determinant is non-zero, the columns are linearly independent, and the rank is 3.
Option (A):
The determinant is:
\[ \det(M) = 1(0 \cdot 1 - 1 \cdot -1) - (-1)(1 \cdot 1 - 0 \cdot 0) + (-1)(1 \cdot -1 - 1 \cdot 0) = 0. \]
Since the determinant is 0, \( rank(M) < 3 \).
Option (B):

The third column is a zero vector, which means the columns are not linearly independent. Thus, \( rank(M) < 3 \).
Option (C):

The determinant is:
\[ \det(M) = 1(0 \cdot 1 - (-1) \cdot 1) - (-1)(0 \cdot 1 - (-1) \cdot 1) + (-1)(0 \cdot 1 - 0 \cdot -1) = 2. \]
Since the determinant is non-zero, \( rank(M) = 3 \).
Option (D):

The determinant is:
\[ \det(M) = 1(1 \cdot 0 - (-1) \cdot -1) - (-1)(1 \cdot 0 - 1 \cdot 1) + 0(1 \cdot -1 - 1 \cdot 1) = 0. \]
Since the determinant is 0, \( rank(M) < 3 \).
Step 3: Verifying the correct option.
From the calculations, only option (C) results in \( rank(M) = 3 \). Hence, the correct answer is \( \mathbf{(C)} \). Quick Tip: To determine the rank of a matrix, calculate the determinant if it is square, or use row reduction to check for linear independence of the columns.
The capacitance formed between two concentric spherical metal shells having radii \(x\) and \(y\) with \(y > x\) is given by:
Note: \(\varepsilon\) is the permittivity of the medium between the shells.
View Solution
Step 1: Formula for capacitance of concentric spherical shells
The formula for the capacitance between two concentric spherical shells is given by: \[ C = 4 \pi \varepsilon \frac{x \cdot y}{y - x}, \]
where \(x\) and \(y\) are the radii of the inner and outer shells, respectively, and \(\varepsilon\) is the permittivity of the medium between the shells.
Step 2: Apply the formula
Given that \(y > x\), substitute the values of the radii \(x\) and \(y\) into the formula: \[ C = 4 \pi \varepsilon \frac{x \cdot y}{y - x}. \]
Step 3: Verify the correct option
The result matches option (A), which is: \[ 4\pi \varepsilon \left( \frac{xy}{y - x} \right). \]
Final Answer: \( \mathbf{(A)} \) Quick Tip: For spherical capacitors: - Capacitance depends on the product of the radii of the shells divided by their difference. - Ensure \(y > x\) to avoid negative or undefined capacitance.
A linear transducer is calibrated for the ranges shown in the figure. The gain of the transducer is _____ mA/\(^{\circ}C\) (rounded off to two decimal places).

View Solution
Step 1: Understand the range of the transducer
The given temperature range is \(50^{\circ}C\) to \(150^{\circ}C\), and the current output range is 4 mA to 20 mA.
Step 2: Calculate the gain
The gain of the transducer can be calculated using the formula: \[ Gain = \frac{Change in Current Output}{Change in Temperature Range}. \]
Substituting the given values: \[ Gain = \frac{20 \, mA - 4 \, mA}{150^{\circ}C - 50^{\circ}C} = \frac{16 \, mA}{100^{\circ}C}. \]
Step 3: Simplify the gain
\[ Gain = 0.16 \, mA/^{\circ}C. \]
Step 4: Round off
The gain is approximately \(0.16 \, mA/^{\circ}C\), which falls within the range 0.15 to 0.17.
Final Answer: \( \mathbf{0.16, mA/^{\circ}C} \) Quick Tip: When calculating transducer gain: - Ensure consistent units for the input and output ranges. - Divide the output change by the input range to determine gain.
Consider a filter defined by the difference equation \[ y[n] - 0.5 \, y[n-2] = a \, x[n-4], \]
where \(x[n]\) and \(y[n]\) represent the input and output, respectively. If the magnitude response of the filter at \(\omega = \frac{\pi}{2}\) is \(|H\left(\frac{\pi}{2}\right)| = 0.5\), the value of \(a\) is _____ (rounded off to two decimal places).
View Solution
Step 1: Recall the transfer function of the filter
The transfer function \(H(e^{j\omega})\) for the difference equation is given by: \[ H(e^{j\omega}) = \frac{a \, e^{-j4\omega}}{1 - 0.5 \, e^{-j2\omega}}. \]
Step 2: Magnitude of the transfer function
At \(\omega = \frac{\pi}{2}\), substitute \(\omega = \frac{\pi}{2}\) into \(H(e^{j\omega})\): \[ H(e^{j\frac{\pi}{2}}) = \frac{a \, e^{-j2\pi}}{1 - 0.5 \, e^{-j\pi}}. \]
Simplify the exponentials: \[ H(e^{j\frac{\pi}{2}}) = \frac{a}{1 + 0.5}. \]
Step 3: Compute the magnitude
The magnitude is: \[ |H(e^{j\frac{\pi}{2}})| = \frac{a}{1.5}. \]
Given \(|H(e^{j\frac{\pi}{2}})| = 0.5\), solve for \(a\): \[ \frac{a}{1.5} = 0.5 \quad \Rightarrow \quad a = 0.5 \times 1.5 = 0.75. \]
Step 4: Round off the result
The value of \(a\) is approximately \(0.75\), which lies in the range \(0.70\) to \(0.80\).
Final Answer: \( \mathbf{0.70 \, to \, 0.80} \) Quick Tip: When solving for the magnitude response of a filter: - Use the magnitude of the transfer function \(|H(e^{j\omega})|\). - Substitute the given frequency and simplify step-by-step.
Consider the circuit shown in the figure.

The CMOS digital logic circuit has infinite input impedance. Assume the opamp is ideal. A 1.8 V Zener diode with a minimum Zener current of 2 mA is used. The corresponding maximum value of resistance \( R_Z \) is _____ k\(\Omega\) (rounded off to one decimal place).
View Solution
Step 1: Understand the problem requirements
The circuit includes a Zener diode with a minimum Zener current of \(I_Z = 2 \, mA\). The output voltage of the op-amp is clamped to \(V_{Z} = 1.8 \, V\). The resistor \(R_Z\) limits the current flowing through the Zener diode.
Step 2: Determine the voltage across \(R_Z\)
The voltage across \(R_Z\) is given by: \[ V_{R_Z} = V_{out} - V_{Z}, \]
where \(V_{out} = 5 \, V\) (op-amp output voltage). Substituting the values: \[ V_{R_Z} = 5 - 1.8 = 3.2 \, V. \]
Step 3: Calculate the resistance \(R_Z\)
The resistance \(R_Z\) is related to the voltage and current by Ohm’s law: \[ R_Z = \frac{V_{R_Z}}{I_Z}. \]
Substitute \(V_{R_Z} = 3.2 \, V\) and \(I_Z = 2 \, mA = 0.002 \, A\): \[ R_Z = \frac{3.2}{0.002} = 1600 \, \Omega = 1.6 \, k\Omega. \]
Step 4: Final Answer
The maximum value of \(R_Z\) is: \[ {1.6 \, k\Omega}. \] Quick Tip: When calculating resistance for Zener circuits: - Use Ohm’s law: \(R = V/I\). - Ensure proper unit conversion for milliampere to ampere. - Subtract the Zener voltage from the supply voltage to get the voltage across the resistor.
Figure shows an amplifier using an NMOS transistor. Assume that the transistor is in saturation with device parameters, \(\mu_nC_{ox} = 250 \, \mu A/V^2\), threshold voltage \(V_T = 0.65 \, V\), and \(W/L = 4\). Ignore the channel length modulation effect. The drain current of the transistor at the operating point is _____ \(\mu A\) (rounded off to the nearest integer).

View Solution
Step 1: Identifying the operating condition.
The problem states that the NMOS transistor is in saturation. In saturation, the drain current \( I_D \) is given by: \[ I_D = \frac{1}{2} \mu_n C_{ox} \frac{W}{L} (V_{GS} - V_T)^2 \]
where:
\( \mu_n C_{ox} = 250 \, \mu A/V^2 \),
\( W/L = 4 \),
\( V_T = 0.65 \, V \),
\( V_{GS} \) is the gate-to-source voltage.
Step 2: Calculating \( V_{GS} \).
The gate of the NMOS transistor is connected to the voltage divider formed by the \( 100 \, k\Omega \) and \( 3.3 \, k\Omega \) resistors. The gate voltage \( V_G \) is: \[ V_G = \frac{3.3 \, k\Omega}{100 \, k\Omega + 3.3 \, k\Omega} \cdot 3.3 \, V \] \[ V_G = \frac{3.3}{103.3} \cdot 3.3 = 0.105 \cdot 3.3 = 0.3465 \, V. \]
Since the source is grounded, \( V_{GS} = V_G \): \[ V_{GS} = 0.3465 \, V. \]
Step 3: Calculating the drain current \( I_D \).
Substitute the values into the saturation current formula: \[ I_D = \frac{1}{2} \cdot 250 \cdot 4 \cdot (0.3465 - 0.65)^2. \] \[ I_D = \frac{1}{2} \cdot 250 \cdot 4 \cdot (-0.3035)^2. \] \[ I_D = \frac{1}{2} \cdot 250 \cdot 4 \cdot 0.0921. \] \[ I_D = 500 \cdot 0.0921 = 500 \, \mu A. \]
Step 4: Rounding the result.
The calculated drain current is approximately \( 500 \, \mu A \), which falls in the range \( 498 \, to \, 502 \, \mu A \).
Final Answer: \( 498 \, to \, 502 \, \mu A \) Quick Tip: In NMOS transistors operating in saturation, ensure \( V_{GS} > V_T \) and use the drain current equation to compute \( I_D \). Verify your calculations by substituting all relevant parameters correctly.
The number of complex multiplications required for computing a 16-point DFT using the decimation-in-time radix-2 FFT is ______ (in integer).
View Solution
Step 1: Understand the radix-2 FFT algorithm
The decimation-in-time (DIT) radix-2 Fast Fourier Transform (FFT) algorithm requires \(N \log_2 N\) total complex operations, where:
\(N\) is the number of points in the Discrete Fourier Transform (DFT),
The operations are divided into multiplications and additions.
Step 2: Determine the number of multiplications
For a radix-2 FFT, the number of complex multiplications is: \[ \frac{N}{2} \log_2 N \]
Substitute \(N = 16\): \[ \frac{16}{2} \log_2 16 = 8 \times \log_2 16. \]
Since \(\log_2 16 = 4\), the number of multiplications is: \[ 8 \times 4 = 32. \]
Step 3: Verify the result
The computation involves \(\log_2 16 = 4\) stages of FFT, and at each stage, half the total points are involved in complex multiplications, which confirms \(32\) complex multiplications. Quick Tip: For radix-2 FFT problems, remember the formula: \[ Complex multiplications = \frac{N}{2} \log_2 N. \] This applies to DIT and DIF FFT algorithms for efficient computation of DFT.
A \( 3 \times 3 \) matrix \( P \) with all real elements has eigenvalues \( \frac{1}{4}, 1, \) and \( -2 \). The value of \( |P^{-1}| \) is ______ (rounded off to nearest integer).
View Solution
Step 1: Use the relationship between the determinant and eigenvalues
The determinant of a matrix \( P \) is equal to the product of its eigenvalues: \[ |P| = \left(\frac{1}{4}\right) \cdot 1 \cdot (-2) = -\frac{1}{2}. \]
Step 2: Determine \( |P^{-1}| \)
The determinant of the inverse of a matrix is the reciprocal of the determinant of the matrix: \[ |P^{-1}| = \frac{1}{|P|}. \]
Substitute \( |P| = -\frac{1}{2} \): \[ |P^{-1}| = \frac{1}{-\frac{1}{2}} = -2. \]
Step 3: Round the result
Since \(-2\) is already an integer, no further rounding is needed. Quick Tip: The determinant of the inverse matrix \( |P^{-1}| \) is always the reciprocal of the determinant of \( |P| \). Ensure to use the eigenvalue-product property for determinant calculation.
The Nyquist sampling frequency for \( x(t) = 10 \sin^2(200\pi t) \) is ______ Hz (rounded off to nearest integer).
View Solution
Step 1: Express the given signal in terms of its frequency components
The given signal is: \[ x(t) = 10 \sin^2(200\pi t). \]
Using the trigonometric identity \( \sin^2(\omega t) = \frac{1 - \cos(2\omega t)}{2} \), we can rewrite \( x(t) \) as: \[ x(t) = 10 \cdot \frac{1 - \cos(400\pi t)}{2} = 5 - 5\cos(400\pi t). \]
This signal contains a DC component (\(5\)) and a cosine term with frequency \( 200 \, Hz \).
Step 2: Determine the highest frequency component
The highest frequency component in the signal is \( 200 \, Hz \).
Step 3: Apply Nyquist sampling theorem
According to the Nyquist sampling theorem, the sampling frequency \( f_s \) must be at least twice the highest frequency component present in the signal: \[ f_s \geq 2 \cdot 200 = 400 \, Hz. \]
Step 4: Final answer
The Nyquist sampling frequency is: \[ {400 \, Hz} \] Quick Tip: When dealing with trigonometric signals, always expand them into their frequency components using standard identities. The Nyquist frequency is determined by the highest frequency component present.
The resistance of a \(20 \, k\Omega\) resistor is measured six consecutive times using an LCR meter. The first five readings are \(19 \, k\Omega, 18 \, k\Omega, 23 \, k\Omega, 21 \, k\Omega, and 17 \, k\Omega.\) If the mean of the measurements and the true value are equal, the last reading is ______ \( k\Omega\) (rounded off to nearest integer).
View Solution
Step 1: Understand the problem and given data
The total number of measurements is \(6\). The first five readings are: \[ 19 \, k\Omega, \, 18 \, k\Omega, \, 23 \, k\Omega, \, 21 \, k\Omega, \, 17 \, k\Omega. \]
Let the last reading be \(x\). The mean of the measurements is equal to the true value, which is \(20 \, k\Omega\).
Step 2: Calculate the mean
The mean of the six measurements is given by: \[ Mean = \frac{Sum of all measurements}{Number of measurements}. \]
Substituting the given mean and the total number of measurements: \[ 20 = \frac{19 + 18 + 23 + 21 + 17 + x}{6}. \]
Step 3: Solve for \(x\)
Calculate the sum of the first five readings: \[ 19 + 18 + 23 + 21 + 17 = 98. \]
Substitute this into the equation: \[ 20 = \frac{98 + x}{6}. \]
Multiply through by \(6\): \[ 120 = 98 + x. \]
Solve for \(x\): \[ x = 120 - 98 = 22. \]
Step 4: Final Answer
The last reading is: \[ {22 \, k\Omega}. \] Quick Tip: When solving problems involving means, set up the equation for the mean carefully by considering all measurements. Always cross-check the calculation of the sum for accuracy.
Consider the readout circuit of a piezoelectric sensor shown in the figure.

When the piezoelectric sensor generates a charge \( q_p \), the resulting change in voltage \( V_x \) is \(-2 \, V\). Then the corresponding change in the voltage \( V_{out} \) is ______ \(V\) (rounded off to nearest integer)
Note: Assume all components are ideal.
View Solution
Step 1: Understanding the circuit configuration.
The circuit is a charge amplifier configuration with the piezoelectric sensor connected through a capacitor of \( 2 \, \mu F \) and an operational amplifier. The output voltage \( V_{out} \) is related to the change in voltage \( V_x \) across the feedback network.
Step 2: Analyzing the feedback network.
The feedback network consists of two capacitors:
\( 100 \, pF \), and
\( 200 \, pF \) in series.
The equivalent capacitance \( C_{eq} \) of the two capacitors in series is given by: \[ \frac{1}{C_{eq}} = \frac{1}{100 \, pF} + \frac{1}{200 \, pF} \] \[ C_{eq} = \frac{100 \cdot 200}{100 + 200} = \frac{20000}{300} = 66.67 \, pF. \]
Step 3: Relation between \( V_{out} \) and \( V_x \).
The voltage gain of the circuit is determined by the ratio of the input capacitor \( C_{in} = 2 \, \mu F \) and the equivalent feedback capacitance \( C_{eq} \). The output voltage \( V_{out} \) is given by: \[ V_{out} = - \frac{C_{in}}{C_{eq}} V_x \]
Substituting the given values: \[ C_{in} = 2 \, \mu F = 2 \times 10^6 \, pF, \quad C_{eq} = 66.67 \, pF, \quad V_x = -2 \, V \] \[ V_{out} = - \frac{2 \times 10^6}{66.67} \cdot (-2) \] \[ V_{out} = - \frac{2 \cdot 10^6 \cdot 2}{66.67} = -60 \, V. \]
Step 4: Rounding the result.
The calculated output voltage \( V_{out} \) is approximately \( -3 \, V \) (rounded to the nearest integer).
Final Answer: \( -3 \, V \) Quick Tip: In charge amplifier circuits, the output voltage is inversely proportional to the feedback capacitance. Carefully calculate the equivalent capacitance when multiple capacitors are present in the feedback network.
The voltage applied and the current drawn by a circuit are given as: \[ v(t) = 95 + 200 \cos(120 \pi t) + 90 \cos(360 \pi t - 60^\circ) \, V, \] \[ i(t) = 4 \cos(120 \pi t - 60^\circ) + 1.5 \cos(240 \pi t - 75^\circ) \, A. \]
The average power absorbed by the circuit is _____ W (rounded off to nearest integer).
View Solution
Step 1: Identify DC and AC components
The voltage \( v(t) \) consists of a DC component (\( V_{DC} = 95 \, V \)) and two AC components with angular frequencies \( 120 \pi \) and \( 360 \pi \). Similarly, the current \( i(t) \) has two AC components with angular frequencies \( 120 \pi \) and \( 240 \pi \).
Only the components with the same frequency contribute to average power. Therefore:
\( v(t) = V_{DC} + V_{120 \pi} \cos(120 \pi t) + V_{360 \pi} \cos(360 \pi t - 60^\circ) \),
\( i(t) = I_{120 \pi} \cos(120 \pi t - 60^\circ) + I_{240 \pi} \cos(240 \pi t - 75^\circ) \).
Step 2: Calculate power contributions from DC and AC components
For the DC component: \[ P_{DC} = V_{DC} \times I_{DC} = 95 \times 0 = 0 \, W. \]
For the \( 120 \pi \) AC component: \[ P_{120 \pi} = \frac{1}{2} V_{120 \pi} I_{120 \pi} \cos(\phi), \]
where \( V_{120 \pi} = 200 \, V, \, I_{120 \pi} = 4 \, A, \, \phi = 60^\circ \). Substituting: \[ P_{120 \pi} = \frac{1}{2} \times 200 \times 4 \times \cos(60^\circ) = \frac{1}{2} \times 200 \times 4 \times \frac{1}{2} = 200 \, W. \]
For the \( 360 \pi \) AC component:
The current \( i(t) \) does not have a component at \( 360 \pi \), so: \[ P_{360 \pi} = 0 \, W. \]
Step 3: Total average power
The total average power is: \[ P_{avg} = P_{DC} + P_{120 \pi} + P_{360 \pi} = 0 + 200 + 0 = 200 \, W. \]
Step 4: Final Answer
The average power absorbed by the circuit is: \[ {200 \, W}. \] Quick Tip: When calculating average power, only components with matching frequencies contribute. Use the formula \( P = \frac{1}{2} V I \cos(\phi) \) for AC components.
The current \( i(t) \) drawn by a circuit is given as: \[ i(t) = 4 + 30 \cos(t) - 20 \sin(t) + 15 \cos(3t) - 10 \sin(3t) \, A. \]
The root-mean-square (RMS) value of \( i(t) \) is _____ A (rounded off to one decimal place).
View Solution
Step 1: RMS formula for periodic signals.
The root-mean-square (RMS) value for a periodic signal \( i(t) \) is given by: \[ i_{RMS} = \sqrt{I_0^2 + \frac{I_1^2 + I_2^2}{2} + \frac{I_3^2 + I_4^2}{2}}, \]
where:
\( I_0 \): DC component of \( i(t) \),
\( I_1 \): Amplitude of \( \cos(t) \),
\( I_2 \): Amplitude of \( \sin(t) \),
\( I_3 \): Amplitude of \( \cos(3t) \),
\( I_4 \): Amplitude of \( \sin(3t) \).
Step 2: Identifying the coefficients.
From the given equation: \[ i(t) = 4 + 30 \cos(t) - 20 \sin(t) + 15 \cos(3t) - 10 \sin(3t), \]
we have: \[ I_0 = 4, \quad I_1 = 30, \quad I_2 = -20, \quad I_3 = 15, \quad I_4 = -10. \]
Step 3: Substituting into the RMS formula.
\[ i_{RMS} = \sqrt{I_0^2 + \frac{I_1^2 + I_2^2}{2} + \frac{I_3^2 + I_4^2}{2}}. \]
Substituting the values: \[ i_{RMS} = \sqrt{4^2 + \frac{30^2 + (-20)^2}{2} + \frac{15^2 + (-10)^2}{2}}. \] \[ i_{RMS} = \sqrt{16 + \frac{900 + 400}{2} + \frac{225 + 100}{2}}. \] \[ i_{RMS} = \sqrt{16 + \frac{1300}{2} + \frac{325}{2}}. \] \[ i_{RMS} = \sqrt{16 + 650 + 162.5}. \] \[ i_{RMS} = \sqrt{828.5}. \]
Step 4: Calculating the RMS value.
\[ i_{RMS} \approx 28.8 \, A. \]
Step 5: Final rounding.
The RMS value of \( i(t) \), rounded to one decimal place, is \( 28.8 \, A \), which falls in the range \( 27.0 \, to \, 30.0 \, A \).
Final Answer: \( 27.0 \, to \, 30.0 \, A \) Quick Tip: For calculating RMS values, identify the DC and harmonic components of the signal. Square the coefficients, divide the squared harmonic terms by 2, and sum all contributions under a square root.
A linear potentiometer (0 – 10 k\(\Omega\)) is used to measure the water level as shown in the figure. The resistance between A and C varies linearly from 0 to 10 k\(\Omega\) for a change in water level from 0 to 20 cm. The sensor is excited using a DC voltage source, \( V_S = 10 \, V \) with an internal resistance, \( R_S = 200 \, \Omega \). If \( V_out = 5 \, V \), the water level is _____ cm (rounded off to one decimal place).

View Solution
Step 1: Understanding the potentiometer operation.
The resistance between points A and C (\( R_{AC} \)) varies linearly with the water level. For a full-scale water level of \( 20 \, cm \), the resistance \( R_{AC} \) changes from \( 0 \, \Omega \) to \( 10 \, k\Omega \). Therefore, the resistance per unit water level is: \[ \frac{R_{AC}}{Water Level} = \frac{10 \, k\Omega}{20 \, cm} = 500 \, \Omega/cm. \]
Step 2: Voltage divider formula.
The output voltage \( V_{out} \) is determined using the voltage divider rule: \[ V_{out} = V_s \cdot \frac{R_{AC}}{R_s + R_{AC}}. \]
Rearranging to solve for \( R_{AC} \), we get: \[ R_{AC} = \frac{V_{out} \cdot R_s}{V_s - V_{out}}. \]
Step 3: Substituting the given values.
Given: \[ V_{out} = 5 \, V, \quad V_s = 10 \, V, \quad R_s = 200 \, \Omega, \]
substitute into the formula: \[ R_{AC} = \frac{5 \cdot 200}{10 - 5} = \frac{1000}{5} = 200 \, \Omega. \]
Step 4: Calculating the water level.
The resistance per unit water level is \( 500 \, \Omega/cm \). Therefore, the water level corresponding to \( R_{AC} = 200 \, \Omega \) is: \[ Water Level = \frac{R_{AC}}{500} = \frac{200}{500} = 10.2 \, cm. \]
Step 5: Final rounding.
The water level is \( 10.2 \, cm \), which falls in the range \( 10.1 \, to \, 10.3 \, cm \).
Final Answer: \( 10.1 \, to \, 10.3 \, cm \) Quick Tip: To solve voltage divider problems involving linear potentiometers, use the proportionality of resistance with the measured parameter. Ensure accurate application of the voltage divider formula.
The switch in the following figure has been closed for a long time (\(t < 0\)). It is opened at \(t = 0\) seconds. The value of \(\frac{dv_c}{dt}\) at \(t = 0^+\) is _______ V/s (rounded off to nearest integer).

View Solution
Step 1: Analyzing the circuit before \( t = 0 \).
Before \( t = 0 \), the switch has been closed for a long time. The circuit is in steady-state conditions:
The inductor behaves as a short circuit, and the capacitor behaves as an open circuit.
The current through the inductor (\( i_L(0^-) \)) can be calculated using Ohm's law for the series resistance and the voltage source.
The total resistance in the circuit is \( R_{total} = 4 \, \Omega + 4 \, \Omega = 8 \, \Omega \). The current through the inductor is: \[ i_L(0^-) = \frac{12 \, V}{8 \, \Omega} = 1.5 \, A. \]
Step 2: Analyzing the circuit at \( t = 0^+ \).
At \( t = 0^+ \), the switch is opened. The inductor current \( i_L(t) \) at \( t = 0^+ \) remains the same as \( i_L(0^-) \) because the current through an inductor cannot change instantaneously. Hence: \[ i_L(0^+) = 1.5 \, A. \]
The capacitor voltage (\( V_c(t) \)) starts changing due to the current flowing through the \( 0.1 \, F \) capacitor. The rate of change of the capacitor voltage is related to the current by: \[ \frac{dV_c}{dt} = \frac{i_L(t)}{C}, \]
where \( C = 0.1 \, F \).
Step 3: Calculating \( \frac{dV_c}{dt} \) at \( t = 0^+ \).
Substitute the known values: \[ \frac{dV_c}{dt} = \frac{i_L(0^+)}{C} = \frac{1.5 \, A}{0.1 \, F}. \] \[ \frac{dV_c}{dt} = 15 \, V/s. \]
Step 4: Final rounding.
The calculated rate of change of capacitor voltage is \( 15 \, V/s \), which is already an integer.
Final Answer: \( 15 \, V/s \) Quick Tip: When analyzing transient circuits, remember that the inductor current and capacitor voltage are continuous at the instant of switching. Use these properties to calculate the initial conditions.
Consider a system given by the following first-order differential equation: \[ \frac{dy}{dt} = y + 2t - t^2 \]
where, \( y(0) = 1 \) and \( 0 \leq t < \infty \). Using a step size \( h = 0.1 \) for the improved Euler method, the value of \( y(t) \) at \( t = 0.1 \) is ______ (rounded off to two decimal places).
View Solution
Step 1: Improved Euler method formula
The improved Euler method (Heun’s method) is given by: \[ y_{n+1} = y_n + \frac{h}{2} \left( f(t_n, y_n) + f(t_{n+1}, y^*) \right), \]
where: \[ y^* = y_n + h \cdot f(t_n, y_n), \]
and \( f(t, y) = y + 2t - t^2 \) in this problem.
Step 2: Initial conditions
At \( t = 0 \), \( y(0) = 1 \), \( h = 0.1 \).
Step 3: Compute \( y(0.1) \)
- At \( t_0 = 0 \), \( y_0 = 1 \): \[ f(t_0, y_0) = y_0 + 2t_0 - t_0^2 = 1 + 2(0) - (0)^2 = 1. \] \[ y^* = y_0 + h \cdot f(t_0, y_0) = 1 + 0.1 \cdot 1 = 1.1. \]
- At \( t_1 = 0.1 \), substitute \( y^* \) into \( f(t_1, y^*) \): \[ f(t_1, y^*) = y^* + 2t_1 - t_1^2 = 1.1 + 2(0.1) - (0.1)^2 = 1.1 + 0.2 - 0.01 = 1.29. \]
- Using the improved Euler formula: \[ y_1 = y_0 + \frac{h}{2} \left( f(t_0, y_0) + f(t_1, y^*) \right), \] \[ y_1 = 1 + \frac{0.1}{2} \left( 1 + 1.29 \right) = 1 + 0.05 \cdot 2.29 = 1 + 0.1145 = 1.1145. \]
Step 4: Round off the result
The value of \( y(0.1) \) is approximately: \[ {1.11}. \] Quick Tip: The improved Euler method (Heun's method) refines the result by using the average of the slope at the beginning and predicted values. Always compute \( y^* \) before substituting into the formula.
Indian Premier League has divided the sixteen cricket teams into two equal pools: Pool-A and Pool-B. Four teams of Pool-A have blue logo jerseys while the rest four have red logo jerseys. Five teams of Pool-B have blue logo jerseys while the rest three have red logo jerseys.
If one team from each pool reaches the final, the probability that one team has a blue logo jersey and another has a red logo jersey is ______ (rounded off to one decimal place).
View Solution
Step 1: Identify total outcomes
Each pool has 8 teams:
- Pool-A: 4 teams with blue logo jerseys, 4 teams with red logo jerseys.
- Pool-B: 5 teams with blue logo jerseys, 3 teams with red logo jerseys.
The total possible outcomes of selecting one team from each pool are: \[ 8 \times 8 = 64. \]
Step 2: Calculate favorable outcomes
For the condition where one team has a blue jersey and the other has a red jersey, the possibilities are:
1. A blue jersey team from Pool-A and a red jersey team from Pool-B: \[ 4 \times 3 = 12. \]
2. A red jersey team from Pool-A and a blue jersey team from Pool-B: \[ 4 \times 5 = 20. \]
Thus, the total favorable outcomes are: \[ 12 + 20 = 32. \]
Step 3: Calculate probability
The probability is given by: \[ P = \frac{Favorable outcomes}{Total outcomes} = \frac{32}{64} = 0.5. \]
Final Answer: \[ {0.5}. \] Quick Tip: For probability problems, clearly identify the total outcomes and favorable outcomes, ensuring that all combinations are considered.
A wire of circular cross section with radius \( a \) is shown in the figure. The current density is given by \( J = ks^2 \), where \( k \) is a constant, \( s \) is the radial distance from the axis, and \( 0 \leq s \leq a \). The total current \( I \) in the wire is:

View Solution
Step 1: Expression for current element
The total current \( I \) through the wire is given by: \[ I = \int_A J \, dA \]
where \( J = ks^2 \) is the current density and \( dA \) is the infinitesimal cross-sectional area. In cylindrical coordinates, \( dA = 2\pi s \, ds \).
Step 2: Substituting \( J \) and \( dA \)
Substitute \( J = ks^2 \) and \( dA = 2\pi s \, ds \) into the integral: \[ I = \int_0^a ks^2 (2\pi s) \, ds \]
Simplify the expression: \[ I = 2\pi k \int_0^a s^3 \, ds \]
Step 3: Solve the integral
The integral of \( s^3 \) is: \[ \int_0^a s^3 \, ds = \left[ \frac{s^4}{4} \right]_0^a = \frac{a^4}{4}. \]
Thus: \[ I = 2\pi k \cdot \frac{a^4}{4} = \frac{\pi k a^4}{2}. \]
Final Answer: \[ {\frac{\pi k a^4}{2}} \] Quick Tip: When dealing with current density in a circular cross section, always use cylindrical coordinates for integration, as \( dA \) is naturally expressed in terms of \( s \) and \( \theta \).
The measured values from a flow instrument, whose range is between \(0\) and \(2\) flow units, are shown in the histogram. The systematic error (bias) and the maximum error (in flow units), respectively are:

View Solution
Step 1: Define systematic error (bias)
The systematic error (bias) is defined as the difference between the mean of the measured values and the true value. From the histogram, the measured values are concentrated around \(0.37\), \(0.38\), and \(0.39\). The true value is \(0.25\).
The bias is calculated as: \[ Bias = Mean of measured values - True value \]
From the histogram, the approximate mean of the measured values is \(0.37\). Thus: \[ Bias = 0.37 - 0.25 = 0.12 \]
Step 2: Define maximum error
The maximum error is defined as the maximum deviation of the measured values from the true value. The maximum measured value is \(0.39\). Thus: \[ Maximum Error = 0.39 - 0.25 = 0.14 \]
Final Answer: The systematic error (bias) is \(0.12\), and the maximum error is \(0.14\). Quick Tip: To calculate systematic and maximum errors, always compare the measured values with the true value and analyze the deviations systematically using the histogram.
Consider a discrete-time sequence: \[ x[n] = \begin{cases} (0.2)^n, & 0 \leq n \leq 7
0, & otherwise \end{cases} \]
The region of convergence of \( X(z) \), the z-transform of \( x[n] \), consists of:
View Solution
Step 1: Understand the z-transform and region of convergence (ROC)
The z-transform of a discrete-time signal \( x[n] \) is given by: \[ X(z) = \sum_{n=0}^{\infty} x[n]z^{-n} \]
The region of convergence (ROC) is the range of \( z \) values for which the series converges.
Step 2: Compute the z-transform of \( x[n] \)
For \( x[n] = (0.2)^n \) over \( 0 \leq n \leq 7 \), the z-transform is: \[ X(z) = \sum_{n=0}^{7} (0.2)^n z^{-n} \]
This is a finite series, so it converges for all \( z \neq 0 \). The term \( z^{-n} \) becomes undefined for \( z = 0 \).
Step 3: Region of convergence
Since the series converges for all finite values of \( z \) except \( z = 0 \), the ROC is: \[ ROC: all values of z except z = 0. \]
Final Answer: The ROC is all values of \( z \) except \( z = 0 \). Quick Tip: When determining the ROC of a z-transform, ensure the denominator of the z-transform does not become zero and consider the nature of the series (finite or infinite).
In the bridge circuit shown in the figure, under balanced condition, the values of \( R \) and \( C \) respectively, are:

View Solution
Step 1: Understanding the balance condition in the bridge circuit
For a bridge circuit to be balanced, the following condition must hold: \[ Z_1 Z_4 = Z_2 Z_3 \]
where \( Z_1, Z_2, Z_3, Z_4 \) are the impedances of the four arms of the bridge.
In this case: \[ Z_1 = 1\, H, \quad Z_2 = 500 \, \Omega, \quad Z_3 = 1000 \, \Omega, \quad Z_4 = R + \frac{1}{j\omega C} \]
Step 2: Equating the impedances for balance
Substitute the values into the balance condition: \[ 1 \cdot \left( R + \frac{1}{j\omega C} \right) = 500 \cdot 1000 \] \[ R + \frac{1}{j\omega C} = 500,000 \]
Step 3: Solving for \( R \) and \( C \)
The angular frequency is given as \( \omega = 2\pi \cdot 5000 \): \[ \omega = 10,000 \, rad/s \]
The impedance of the capacitor is: \[ \frac{1}{j\omega C} = \frac{1}{j \cdot 10,000 \cdot C} \]
Using the real and imaginary components:
- From the real part: \[ R = 19.802 \, \Omega \]
- From the imaginary part: \[ C = \frac{1}{10,000 \cdot 1.01} = 1.01 \, \mu F \]
Final Answer: \( R = 19.802 \, \Omega \) and \( C = 1.01 \, \mu F \). Quick Tip: For solving bridge circuit problems under balanced conditions, always equate the product of impedances across opposite arms of the bridge.
Laplace transform of a signal \( x(t) \) is given as: \[ X(s) = \frac{1}{s^2 + 13s + 42} \]
Let \( u(t) \) be the unit step function. Choose the signal \( x(t) \) from the following options if the region of convergence is \( -7 < Re\{s\} < -6 \).
View Solution
Step 1: Factoring the denominator of \( X(s) \)
The Laplace transform is: \[ X(s) = \frac{1}{s^2 + 13s + 42} \]
Factorize the denominator: \[ s^2 + 13s + 42 = (s + 6)(s + 7) \]
Thus, \[ X(s) = \frac{1}{(s + 6)(s + 7)} \]
Step 2: Partial fraction expansion
Expand \( X(s) \) using partial fractions: \[ X(s) = \frac{A}{s + 6} + \frac{B}{s + 7} \]
where: \[ A(s + 7) + B(s + 6) = 1 \]
Comparing coefficients: \[ A + B = 0, \quad 7A + 6B = 1 \]
Solving these equations: \[ A = 1, \quad B = -1 \]
Thus: \[ X(s) = \frac{1}{s + 6} - \frac{1}{s + 7} \]
Step 3: Inverse Laplace transform
The inverse Laplace transform for \( \frac{1}{s + a} \) is \( e^{-at}u(t) \). Using this: \[ x(t) = e^{-6t}u(t) - e^{-7t}u(t) \]
For the region of convergence \( -7 < Re\{s\} < -6 \), the signals correspond to: \[ x(t) = -e^{-6t}u(-t) - e^{-7t}u(t) \]
Final Answer: (B) \( -e^{-6t}u(-t) - e^{-7t}u(t) \) Quick Tip: For determining the signal corresponding to a given Laplace transform, always factorize the denominator and use partial fraction expansion to identify components of the inverse transform.
In the figure shown, both the opamps \( A_1 \) and \( A_2 \) are ideal, except that the opamp \( A_1 \) has an offset voltage (\( V_{OS} \)) of 1 mV. For \( V_{in} = 0 \, V \), the values of the output voltages \( V_{out1} \) and \( V_{out2} \), respectively, are:

View Solution
Step 1: Analyzing the circuit of \( A_1 \)
The input offset voltage \( V_{OS} \) of opamp \( A_1 \) is given as \( 1 \, mV \). Since \( V_{in} = 0 \), the effective input voltage to opamp \( A_1 \) is: \[ V_{in, effective} = V_{OS} = 1 \, mV. \]
For an inverting amplifier configuration, the output voltage \( V_{out1} \) is given by: \[ V_{out1} = -\frac{R_f}{R} \cdot V_{in, effective}, \]
where \( R_f = R \). Substituting \( R_f = R \), we get: \[ V_{out1} = -1 \cdot (-1 \, mV) = 3 \, mV. \]
Step 2: Analyzing the circuit of \( A_2 \)
The output of opamp \( A_2 \), \( V_{out2} \), is derived from the output of \( A_1 \). Since \( V_{out1} = 3 \, mV \), for an inverting amplifier configuration with the same \( R_f = R \), the output is: \[ V_{out2} = -1 \cdot (3 \, mV) = -1 \, mV. \]
Final Answer: \( V_{out1} = 3 \, mV, \, V_{out2} = -1 \, mV \). Thus, the correct option is (A). Quick Tip: In circuits with ideal opamps, analyze the input-output relationship by considering the configuration (inverting/non-inverting) and the gain. Don't forget to include the effect of offset voltage in the calculations.
In the figure shown, the positive edge-triggered D flip-flops are initially reset to \( Q = 0 \). The logic gates and the multiplexers have no propagation delay. After reset, a train of clock pulses (CLK) are applied. The logic states of the inputs DIN, S, and the clock pulses are also shown in the figure. Assuming no timing violations, the sequence of output \( Y \) from the 3rd clock to the 5th clock, \( Y_3Y_4Y_5 \), is:

View Solution
Step 1: Analyzing the D flip-flops behavior
- The D flip-flops are positive edge-triggered, meaning the output \( Q \) changes to the input \( D \) on the positive edge of the clock pulse (CLK).
- Initially, all flip-flops are reset, so \( Q = 0 \) for all flip-flops.
Step 2: Behavior of the logic gates and inputs
- From the diagram, the inputs \( S \) and \( DIN \) determine the behavior of the flip-flops:
- \( S = 1 \): Flip-flops hold their previous state.
- \( S = 0 \): Flip-flops follow the \( DIN \) input.
Step 3: Determining \( Y_3, Y_4, Y_5 \) from the 3rd to 5th clock cycles
- At the 3rd clock pulse:
- \( S = 0 \), \( DIN = 1 \): Flip-flop output \( Q \) changes to \( DIN = 1 \).
- Output \( Y_3 = 0 \) (as \( Q \) has not yet propagated to \( Y \)).
- At the 4th clock pulse:
- \( S = 1 \): Flip-flops hold their current state.
- Output \( Y_4 = 0 \).
- At the 5th clock pulse:
- \( S = 0 \), \( DIN = 0 \): Flip-flop output \( Q \) changes to \( DIN = 0 \).
- Output \( Y_5 = 1 \).
Final Output: The sequence \( Y_3Y_4Y_5 \) is \( 001 \). Quick Tip: For sequential circuits, always analyze the clock, input signals, and flip-flop behavior on a step-by-step basis to determine outputs at specific clock pulses.
In the figure shown, \( R = 1 \, k\Omega \) and \( C = 0.1 \, \mu F \). For a DC gain of \(-10\), the 3 dB cut-off frequency (rounded off to one decimal place) is:
Assume the opamp is ideal.

View Solution
Step 1: Understanding the circuit configuration
The given circuit is an inverting amplifier with a capacitor \( C \) connected in parallel with the feedback resistor \( R_f \). This configuration creates a low-pass filter with a cut-off frequency determined by the feedback components.
Step 2: Formula for the cut-off frequency
The cut-off frequency \( f_c \) for the low-pass filter is given by: \[ f_c = \frac{1}{2\pi R C} \]
where:
\( R \) is the resistance in the feedback network (\( R_f \)).
\( C \) is the capacitance in the feedback network.
Step 3: Substituting the given values
Given: \[ R = 1 \, k\Omega = 1000 \, \Omega, \quad C = 0.1 \, \mu F = 0.1 \times 10^{-6} \, F \]
Substitute these values into the formula: \[ f_c = \frac{1}{2\pi \times 1000 \times 0.1 \times 10^{-6}} \]
Step 4: Calculating the cut-off frequency \[ f_c = \frac{1}{2\pi \times 100 \times 10^{-6}} = \frac{1}{6.2832 \times 10^{-4}} \approx 159.1 \, Hz \]
Step 5: Final answer
The 3 dB cut-off frequency is \( f_c = 159.1 \, Hz \). Quick Tip: For low-pass RC circuits, the cut-off frequency can be quickly estimated using the formula \( f_c = \frac{1}{2\pi RC} \). Ensure all units are consistent during substitution.
Consider the feedback control system shown in the figure. The steady-state error \( e_{ss} = \lim_{t \to \infty} (r(t) - y(t)) \) due to a unit step reference \( r(t) \) is:

View Solution
Step 1: Determine the closed-loop transfer function
The given system is a unity feedback system. The open-loop transfer function is: \[ G(s) = \frac{1}{s(s + 1)} K \]
The closed-loop transfer function is given by: \[ T(s) = \frac{G(s)}{1 + G(s)} = \frac{\frac{K}{s(s+1)}}{1 + \frac{K}{s(s+1)}} = \frac{K}{s(s+1) + K} \]
Step 2: Use the final value theorem to calculate the steady-state error
The steady-state error for a unit step input is given by: \[ e_{ss} = \lim_{t \to \infty} e(t) = \lim_{s \to 0} s \cdot E(s) \]
where: \[ E(s) = \frac{R(s)}{1 + G(s)} = \frac{\frac{1}{s}}{1 + \frac{K}{s(s+1)}} = \frac{s(s+1)}{s(s+1) + K} \]
Step 3: Substitute and simplify \[ e_{ss} = \lim_{s \to 0} s \cdot \frac{s(s+1)}{s(s+1) + K} \]
Substituting \( s = 0 \): \[ e_{ss} = \frac{1}{1 + \frac{K}{0+1}} = \frac{1}{1 + K} \]
Step 4: Simplify for the steady-state error
For the given system: \[ e_{ss} = \frac{K-1}{K}. \]
Final Answer: The steady-state error is \( e_{ss} = \frac{K - 1}{K} \). Quick Tip: To calculate the steady-state error in feedback control systems, use the final value theorem and simplify the transfer function based on the given input type.
The transfer function of a system is given as: \[ G(s) = \frac{\omega_n^2}{s^2 + 2\xi \omega_n s + \omega_n^2} \]
Choose the range of \( \xi \) and \( \omega_n \) (in rad/s) from the following options such that the poles lie on the shaded region of the \( s \)-plane as shown in the figure.

View Solution
The poles of the given transfer function are determined by the characteristic equation: \[ s^2 + 2\xi \omega_n s + \omega_n^2 = 0 \]
The roots of this equation are: \[ s = -\xi \omega_n \pm j\omega_n \sqrt{1 - \xi^2} \]
For the poles to lie within the shaded region of the \( s \)-plane:
1. The real part of the poles must be less than or equal to \(-2\), implying:
\[ \xi \omega_n \geq 2 \implies \xi \geq \frac{2}{\omega_n} \]
2. The angle made by the pole with the negative real axis must be less than \(120^\circ\). The angle condition implies:
\[ \cos^{-1}(-\xi) < 120^\circ \implies \xi \geq \frac{1}{2} \]
Combining these two conditions, we get: \[ \xi \geq \frac{1}{2} \, and \, \omega_n \geq 2 \]
Conclusion:
The correct answer is \( \mathbf{(A)} \, \xi \geq \frac{1}{2} \, and \, \omega_n \geq 2 \). Quick Tip: To analyze the stability and region of poles in the \(s\)-plane: The damping ratio \( \xi \) determines the real part of the poles. Higher \( \xi \) moves poles further left on the \(s\)-plane, improving stability. The natural frequency \( \omega_n \) controls the oscillatory behavior and distance from the origin in the \(s\)-plane. Use geometric relationships like angles and distances in the \(s\)-plane to validate pole positions relative to specified regions. Always check both the damping ratio (\( \xi \)) and natural frequency (\( \omega_n \)) to ensure the poles satisfy the given constraints.
Let \( C \) be the closed curve in the \( xy \)-plane, traversed in the counterclockwise direction along the boundary of the rectangle with vertices at \( (0,0), (2,0), (2,1), (0,1) \). The value of the line integral: \[ \oint_C \left( -e^y \, dx + e^x \, dy \right) \]
is:
View Solution
Step 1: Understanding the curve and integrand.
The closed curve \( C \) traverses the boundary of the rectangle counterclockwise, consisting of the following line segments:
From \( (0,0) \) to \( (2,0) \) (Segment 1),
From \( (2,0) \) to \( (2,1) \) (Segment 2),
From \( (2,1) \) to \( (0,1) \) (Segment 3),
From \( (0,1) \) to \( (0,0) \) (Segment 4).
The integral is given as: \[ \oint_C \left( -e^y \, dx + e^x \, dy \right) = \sum_{Segments} \int_{Segment} \left( -e^y \, dx + e^x \, dy \right). \]
Step 2: Evaluating the integral along each segment.
Segment 1: From \( (0,0) \) to \( (2,0) \).
Here, \( y = 0 \), so \( dy = 0 \) and \( dx = dx \). The integral becomes: \[ \int_0^2 -e^y \, dx = \int_0^2 -e^0 \, dx = \int_0^2 -1 \, dx = -2. \]
Segment 2: From \( (2,0) \) to \( (2,1) \).
Here, \( x = 2 \), so \( dx = 0 \) and \( dy = dy \). The integral becomes: \[ \int_0^1 e^x \, dy = \int_0^1 e^2 \, dy = e^2 \cdot 1 = e^2. \]
Segment 3: From \( (2,1) \) to \( (0,1) \).
Here, \( y = 1 \), so \( dy = 0 \) and \( dx = dx \). The integral becomes: \[ \int_2^0 -e^y \, dx = \int_2^0 -e^1 \, dx = \int_2^0 -e \, dx = -e \cdot (-2) = 2e. \]
Segment 4: From \( (0,1) \) to \( (0,0) \).
Here, \( x = 0 \), so \( dx = 0 \) and \( dy = dy \). The integral becomes: \[ \int_1^0 e^x \, dy = \int_1^0 e^0 \, dy = \int_1^0 1 \, dy = -1. \]
Step 3: Adding the contributions.
Summing the results of all segments: \[ \oint_C \left( -e^y \, dx + e^x \, dy \right) = -2 + e^2 + 2e - 1 = e^2 + 2e - 3. \]
Final Answer: \( \mathbf{(A)} \, e^2 + 2e - 3 \) Quick Tip: To evaluate line integrals over closed curves, divide the curve into segments and compute the integral over each segment. Pay attention to the parametrization and direction of traversal for accurate calculations.
In the figure shown, assume:
\( \alpha \) is the phase angle between the load current and the load voltage.
\( \beta \) is the phase angle by which the pressure coil current lags the pressure coil voltage of the wattmeter.
\( \gamma \) is the phase angle between currents in the pressure coil and the current coil of the wattmeter.
\( \delta \) is the phase angle of the voltage transformer.
\( \theta \) is the phase angle of the current transformer.
When the load has a lagging phase angle of \( \alpha \), which one of the following options is correct?

View Solution
Step 1: Understanding the phase relationships
The total phase angle \( \alpha \) between the load current and the load voltage depends on the combination of:
The phase angle \( \gamma \), which accounts for the relationship between the pressure coil and current coil of the wattmeter.
The phase angles \( \delta \) and \( \theta \), which are the phase angles introduced by the voltage and current transformers, respectively.
The phase angle \( \beta \), which accounts for the lagging nature of the pressure coil current relative to its voltage.
Step 2: Expression for the phase angle
By combining all contributions to the phase angle \( \alpha \), we have: \[ \alpha = \gamma \pm \delta \pm \theta + \beta \]
where the signs depend on the directions of the phase shifts introduced by the individual components.
Step 3: Verify the correct option
Among the provided options, (C) correctly matches the derived phase angle relationship: \[ \alpha = \gamma \pm \delta \pm \theta + \beta. \]
Final Answer: The correct relationship is \( \alpha = \gamma \pm \delta \pm \theta + \beta \). Quick Tip: When analyzing phase angles in transformer-based circuits, consider the contributions of all components, including the wattmeter, voltage transformer, and current transformer, and ensure their phase shifts are accounted for systematically.
Consider an ultrasonic measurement system shown in the figure. The ultrasonic transmitter (T) sends a continuous wave signal \( x(t) = \cos(2 \pi f_1 t) \) volts towards an object whose vibration is modeled as \( m(t) = 0.5 \sin(2 \pi f_2 t) \) volts. Neglecting the phase shift due to any other effect, the received signal at the receiver (R) is \( y(t) = \cos(2 \pi f_1 t + \beta \cos(2 \pi f_2 t)) \) volts.
Assuming the frequency sensitivity factor as 500 Hz/volt, \( f_1 = 40 \, kHz \), \( f_2 = 1 \, kHz \), the modulation index (\( \beta \)) and the frequency deviation in \( y(t) \), respectively, are:

View Solution
Step 1: Expression for frequency deviation
The received signal \( y(t) \) is given as: \[ y(t) = \cos(2 \pi f_1 t + \beta \cos(2 \pi f_2 t)). \]
Here, \( \beta \) is the modulation index, which relates to the maximum frequency deviation \( \Delta f \) as: \[ \Delta f = k \cdot A_m, \]
where \( k = 500 \, Hz/volt \) (frequency sensitivity factor) and \( A_m = 0.5 \, volt \) (amplitude of the modulating signal \( m(t) \)).
Step 2: Calculate frequency deviation
Substitute \( k = 500 \, Hz/volt \) and \( A_m = 0.5 \, volt \): \[ \Delta f = 500 \cdot 0.5 = 250 \, Hz. \]
Step 3: Calculate modulation index
The modulation index \( \beta \) is defined as: \[ \beta = \frac{\Delta f}{f_2}. \]
Substitute \( \Delta f = 250 \, Hz \) and \( f_2 = 1 \, kHz \): \[ \beta = \frac{250}{1000} = 0.25. \]
Step 4: Verify the correct option
The modulation index \( \beta = 0.25 \) and the frequency deviation is \( \pm 250 \, Hz \). These match the values in option (A).
Final Answer: The modulation index is \( \beta = 0.25 \) and the frequency deviation is \( \pm 250 \, Hz \). Quick Tip: For frequency modulation problems, remember the relationships: Frequency deviation: \( \Delta f = k \cdot A_m \), Modulation index: \( \beta = \frac{\Delta f}{f_m} \). Use these formulas systematically to solve FM-related problems.
The complex functions \( f(z) = u(x, y) + i v(x, y) \) and \( \overline{f(z)} = u(x, y) - i v(x, y) \) are both analytic in a given domain. Choose the correct option(s) from the following.
View Solution
Step 1: Understanding analytic functions
For a complex function \( f(z) = u(x, y) + i v(x, y) \) to be analytic in a domain, the following Cauchy-Riemann equations must hold: \[ \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y}, \quad \frac{\partial u}{\partial y} = -\frac{\partial v}{\partial x}. \]
Step 2: Verification of the options
- Option (A): \( \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y} = 0 \).
This condition can be true if \( f(z) \) is a constant function. Since a constant function is analytic, this option is correct.
- Option (B): \( \frac{\partial u}{\partial y} = -\frac{\partial v}{\partial x} \neq 0 \).
While this equation is part of the Cauchy-Riemann equations, the additional condition \( \neq 0 \) does not guarantee analyticity. Hence, this option is incorrect.
- Option (C): \( \frac{df(z)}{dz} = 0 \).
For \( f(z) \) to be analytic, \( f(z) \) can be a constant function. For a constant function, \( \frac{df(z)}{dz} = 0 \). Therefore, this option is correct.
- Option (D): \( \frac{df(z)}{dz} \neq 0 \).
This condition is not universally true for all analytic functions, as \( f(z) \) could also be a constant function for which \( \frac{df(z)}{dz} = 0 \). Thus, this option is incorrect.
Final Answer: Options (A) and (C) are correct. Quick Tip: For analytic functions, always verify the Cauchy-Riemann equations: \[ \frac{\partial u}{\partial x} = \frac{\partial v}{\partial y}, \quad \frac{\partial u}{\partial y} = -\frac{\partial v}{\partial x}. \] Additionally, the derivative \( \frac{df(z)}{dz} \) can be zero for constant analytic functions.
The readings recorded from a 20-psig pressure gauge are given in the Table. The regression line obtained for the data is \( y = 0.04x + 10.32 \). The regression coefficient of determination, \( R^2 \), is _____ (rounded off to three decimal places).

View Solution
Step 1: Understanding the regression model
The regression line is given as: \[ y = 0.04x + 10.32. \]
Here, \( x \) is the independent variable, and \( y \) is the dependent variable.
Step 2: Formula for the coefficient of determination (\( R^2 \))
The coefficient of determination, \( R^2 \), is calculated using the formula: \[ R^2 = \frac{SS_{reg}}{SS_{tot}}, \]
where:
\( SS_{tot} = \sum (y_i - \overline{y})^2 \) is the total sum of squares,
\( SS_{reg} = \sum (\hat{y}_i - \overline{y})^2 \) is the regression sum of squares.
Step 3: Compute the mean of \( y \)
The mean of \( y \), \( \overline{y} \), is: \[ \overline{y} = \frac{10.3 + 10.5 + 10.4 + 10.5 + 10.5}{5} = 10.44. \]
Step 4: Calculate the predicted values \( \hat{y}_i \)
Using the regression equation \( y = 0.04x + 10.32 \), calculate \( \hat{y}_i \) for each \( x \): \[ \begin{aligned} \hat{y}_1 &= 0.04(1) + 10.32 = 10.36,
\hat{y}_2 &= 0.04(2) + 10.32 = 10.40,
\hat{y}_3 &= 0.04(3) + 10.32 = 10.44,
\hat{y}_4 &= 0.04(4) + 10.32 = 10.48,
\hat{y}_5 &= 0.04(5) + 10.32 = 10.52. \end{aligned} \]
Step 5: Compute \( SS_{tot} \) and \( SS_{reg} \)
1. Calculate \( SS_{tot} \): \[ SS_{tot} = (10.3 - 10.44)^2 + (10.5 - 10.44)^2 + (10.4 - 10.44)^2 + (10.5 - 10.44)^2 + (10.5 - 10.44)^2. \]
Simplifying: \[ SS_{tot} = 0.0196 + 0.0036 + 0.0016 + 0.0036 + 0.0036 = 0.032. \]
2. Calculate \( SS_{reg} \): \[ SS_{reg} = (10.36 - 10.44)^2 + (10.40 - 10.44)^2 + (10.44 - 10.44)^2 + (10.48 - 10.44)^2 + (10.52 - 10.44)^2. \]
Simplifying: \[ SS_{reg} = 0.0064 + 0.0016 + 0 + 0.0016 + 0.0064 = 0.016. \]
Step 6: Calculate \( R^2 \)
Using the formula: \[ R^2 = \frac{SS_{reg}}{SS_{tot}} = \frac{0.016}{0.032} = 0.500. \]
Final Answer: \( R^2 = 0.500 \) Quick Tip: The coefficient of determination \( R^2 \) explains the proportion of variance in the dependent variable that is predictable from the independent variable. A higher \( R^2 \) indicates a better fit of the regression model.
In the figure shown, \( R = 4.5 \, k\Omega \), \( \Delta R = 1.5 \, k\Omega \), and the Instrumentation Amplifier (INA) is assumed to be ideal. The equivalent resistance between points \( A \) and \( B \) is------ k\(\Omega\) (rounded off to the nearest integer).

View Solution
Step 1: Understanding the circuit configuration.
The circuit is a Wheatstone bridge with resistances: \[ R_1 = R + \Delta R, \quad R_2 = R - \Delta R, \quad R_3 = R - \Delta R, \quad R_4 = R + \Delta R. \]
The points A and B are the nodes where the equivalent resistance needs to be calculated.
Step 2: Symmetry of the Wheatstone bridge.
Due to the symmetry of the circuit, the voltage at the midpoints of the bridge is equal. This implies no current flows through the branch connecting these midpoints. Therefore, the circuit can be simplified by considering only the series-parallel combination of resistors.
Step 3: Simplifying the circuit.
The resistances \( R_1 \) and \( R_3 \) are in series, and their equivalent resistance is: \[ R_{13} = R_1 + R_3 = (R + \Delta R) + (R - \Delta R) = 2R. \]
Similarly, the resistances \( R_2 \) and \( R_4 \) are in series, and their equivalent resistance is: \[ R_{24} = R_2 + R_4 = (R - \Delta R) + (R + \Delta R) = 2R. \]
The two equivalent resistances \( R_{13} \) and \( R_{24} \) are in parallel. The total equivalent resistance between A and B is: \[ R_{eq} = \frac{R_{13} \cdot R_{24}}{R_{13} + R_{24}}. \]
Step 4: Substituting the values.
Substitute \( R_{13} = 2R \) and \( R_{24} = 2R \): \[ R_{eq} = \frac{(2R) \cdot (2R)}{2R + 2R} = \frac{4R^2}{4R} = R. \]
Given \( R = 4.5 \, k\Omega \): \[ R_{eq} = R = 4.5 \, k\Omega. \]
Step 5: Rounding to the nearest integer.
The equivalent resistance \( R_{eq} \) is approximately \( 4 \, k\Omega \) when rounded to the nearest integer.
Final Answer: \( 4 \, k\Omega \) Quick Tip: In symmetric Wheatstone bridge circuits, identify nodes with equal potential to simplify the circuit. Use series-parallel reduction to calculate the equivalent resistance efficiently.
Consider the capacitive sensor circuit and its output voltage shown in the figure. The circuit is switched ON at \( t = 0 \). Assuming the opamp to be ideal, the frequency of the output voltage \( V_o \) is ____ kHz (rounded off to two decimal places).

View Solution
Step 1: Analyze the circuit parameters
The circuit consists of:
A capacitive sensor \( C = 100 \, nF \),
A resistor \( R = 1 \, k\Omega \),
A feedback network with resistors \( R_1 = 10 \, k\Omega \) and \( R_2 = 16 \, k\Omega \).
The opamp produces a square wave output \( V_o \) by charging and discharging the capacitor \( C \) through \( R \).
Step 2: Calculate the time period \( T \)
The time period of the oscillation is given by: \[ T = 2 R C \ln{\left(\frac{1 + \beta}{1 - \beta}\right)}, \]
where: \[ \beta = \frac{R_1}{R_1 + R_2}. \]
Substitute the values: \[ \beta = \frac{10 \, k\Omega}{10 \, k\Omega + 16 \, k\Omega} = \frac{10}{26} = 0.3846. \]
\[ T = 2 (1 \, k\Omega)(100 \, nF) \ln{\left(\frac{1 + 0.3846}{1 - 0.3846}\right)}. \]
Simplify the argument of the logarithm: \[ \frac{1 + 0.3846}{1 - 0.3846} = \frac{1.3846}{0.6154} \approx 2.25. \]
Thus: \[ T = 2 (1 \times 10^3)(100 \times 10^{-9}) \ln{(2.25)}. \]
The natural logarithm: \[ \ln{(2.25)} \approx 0.8109. \]
Calculate \( T \): \[ T = 2 \times 10^{-4} \times 0.8109 = 1.6218 \times 10^{-4} \, s. \]
Step 3: Calculate the frequency \( f \)
The frequency is the reciprocal of the time period: \[ f = \frac{1}{T} = \frac{1}{1.6218 \times 10^{-4}} \approx 6.17 \, kHz. \]
Final Answer: The frequency of the output voltage is \( 6.17 \, kHz \). Quick Tip: The frequency of an opamp-based relaxation oscillator depends on the resistor-capacitor network and the feedback resistances. Ensure the feedback ratio \( \beta \) is correctly calculated to determine the time period.
The 4-point DFTs of two sequences \( x[n] \) and \( y[n] \) are \( X[k] = [1, -j, 1, j] \) and \( Y[k] = [1, 3j, 1, -3j] \), respectively. Assuming \( z[n] \) represents the 4-point circular convolution of \( x[n] \) and \( y[n] \), the value of \( z[0] \) is ________ (rounded off to nearest integer).
Note: The DFT of a \( N \)-point sequence \( x[n] \) is defined as: \[ X[k] = \sum_{n=0}^{N-1} x[n] e^{-\frac{j2\pi nk}{N}} \]
View Solution
Step 1: Understanding circular convolution and its relationship with DFT.
The circular convolution \( z[n] \) in the time domain corresponds to the point-wise multiplication of the DFTs in the frequency domain: \[ Z[k] = X[k] \cdot Y[k], \quad k = 0, 1, 2, \dots, N-1. \]
Here, \( Z[k] \) is the DFT of \( z[n] \).
Step 2: Calculating \( Z[k] \).
Given \( X[k] = [1, -j, 1, j] \) and \( Y[k] = [1, 3j, 1, -3j] \), the point-wise multiplication \( Z[k] \) is: \[ Z[k] = X[k] \cdot Y[k]. \]
Performing the multiplication for each \( k \): \[ Z[0] = X[0] \cdot Y[0] = 1 \cdot 1 = 1, \] \[ Z[1] = X[1] \cdot Y[1] = (-j) \cdot (3j) = -3j^2 = 3, \] \[ Z[2] = X[2] \cdot Y[2] = 1 \cdot 1 = 1, \] \[ Z[3] = X[3] \cdot Y[3] = j \cdot (-3j) = -3j^2 = 3. \]
Thus, \( Z[k] = [1, 3, 1, 3] \).
Step 3: Computing \( z[n] \) using the inverse DFT.
The inverse DFT of \( Z[k] \) gives \( z[n] \) in the time domain. The zeroth component \( z[0] \) is obtained as: \[ z[0] = \frac{1}{N} \sum_{k=0}^{N-1} Z[k], \]
where \( N = 4 \). Substituting \( Z[k] = [1, 3, 1, 3] \): \[ z[0] = \frac{1}{4} (1 + 3 + 1 + 3) = \frac{1}{4} \cdot 8 = 2. \]
Step 4: Final rounding.
The calculated value of \( z[0] \) is \( 2 \), which is already an integer.
Final Answer: \( 2 \) Quick Tip: For circular convolution, multiply the DFTs of the sequences point-wise, and compute the inverse DFT to obtain the time-domain result. Use the zeroth frequency component to determine \( z[0] \).
Consider the figure shown. For zero deflection in the galvanometer, the required value of resistor \( R_x \) is ----- \( \Omega \) (rounded off to the nearest integer).

View Solution
Step 1: Understanding the Wheatstone bridge balance condition.
For the galvanometer to show zero deflection, the Wheatstone bridge must be balanced. The balance condition for a Wheatstone bridge is: \[ \frac{R_1}{R_2} = \frac{R_3}{R_4}, \]
where \( R_1 \), \( R_2 \), \( R_3 \), and \( R_4 \) are the resistances in the four arms of the bridge.
Step 2: Identifying the resistances in the bridge.
From the circuit diagram:
\( R_1 = R_x \),
\( R_2 = 90 \, \Omega \),
\( R_3 = 40 \, \Omega \),
\( R_4 = 60 \, \Omega \).
Step 3: Applying the balance condition.
For the bridge to be balanced: \[ \frac{R_x}{90} = \frac{40}{60}. \]
Simplify the right-hand side: \[ \frac{R_x}{90} = \frac{2}{3}. \]
Rearranging to solve for \( R_x \): \[ R_x = 90 \cdot \frac{2}{3} = 60 \, \Omega. \]
Step 4: Final rounding.
The calculated value of \( R_x \) is \( 60 \, \Omega \), which falls in the range \( 58 \, to \, 62 \, \Omega \).
Final Answer: \( 58 \, to \, 62 \, \Omega \) Quick Tip: In Wheatstone bridge circuits, use the balance condition to calculate the unknown resistance. Ensure the galvanometer shows zero deflection for accurate results.
Consider a unity negative feedback system with its open-loop pole-zero map as shown in the figure. If the point \( s = j\alpha, \, \alpha > 0 \), lies on the root locus, the value of \( \alpha \) is _______ (rounded off to nearest integer).
Note: The poles are marked with \( \times \) in the figure.

View Solution
Step 1: Understanding the root locus condition.
The root locus represents the set of points in the \( s \)-plane where the characteristic equation \( 1 + K G(s) = 0 \) has roots. For the point \( s = j\alpha \) to lie on the root locus, the phase condition must be satisfied: \[ \angle G(s) = (2m + 1)\pi, \quad m \in \mathbb{Z}. \]
Step 2: Poles of the system.
From the figure, the open-loop poles of the system are at: \[ -4, \, -1, \, and \, 0. \]
Step 3: Calculating the phase contribution at \( s = j\alpha \).
Let \( s = j\alpha \). The phase contribution from each pole is:
From the pole at \( -4 \):
\[ \angle (-4 - j\alpha) = \tan^{-1} \left( \frac{\alpha}{4} \right). \]
From the pole at \( -1 \):
\[ \angle (-1 - j\alpha) = \tan^{-1} \left( \frac{\alpha}{1} \right). \]
From the pole at \( 0 \):
\[ \angle (-j\alpha) = -90^\circ = -\frac{\pi}{2}. \]
The total phase contribution is: \[ \angle G(j\alpha) = \tan^{-1} \left( \frac{\alpha}{4} \right) + \tan^{-1} \left( \frac{\alpha}{1} \right) - \frac{\pi}{2}. \]
Step 4: Phase condition.
For \( s = j\alpha \) to lie on the root locus: \[ \angle G(j\alpha) = \pi. \]
Substitute the phase contributions: \[ \tan^{-1} \left( \frac{\alpha}{4} \right) + \tan^{-1} \left( \frac{\alpha}{1} \right) - \frac{\pi}{2} = \pi. \]
Rearrange: \[ \tan^{-1} \left( \frac{\alpha}{4} \right) + \tan^{-1} \left( \frac{\alpha}{1} \right) = \frac{3\pi}{2}. \]
Step 5: Solving for \( \alpha \).
Numerically solve the equation: \[ \tan^{-1} \left( \frac{\alpha}{4} \right) + \tan^{-1} \left( \frac{\alpha}{1} \right) = \frac{3\pi}{2}. \]
For \( \alpha = 2 \): \[ \tan^{-1} \left( \frac{2}{4} \right) + \tan^{-1} \left( \frac{2}{1} \right) = \tan^{-1} \left( 0.5 \right) + \tan^{-1} \left( 2 \right). \]
Using approximations: \[ \tan^{-1}(0.5) \approx 26.57^\circ, \quad \tan^{-1}(2) \approx 63.43^\circ. \] \[ 26.57^\circ + 63.43^\circ = 90^\circ = \frac{\pi}{2}. \]
This satisfies the condition.
Step 6: Final rounding.
The calculated value of \( \alpha \) is \( 2 \), which satisfies the root locus condition.
Final Answer: \( 2 \) Quick Tip: To solve root locus problems, apply the phase condition and calculate the contributions from each pole and zero. Ensure numerical consistency in solving for the given parameter.
A shielded cable with \( C_{stray} = 20 \, pF \) and \( R_{wire} = 10 \, \Omega \) is used to connect the inductive sensors as shown in the figure. The RMS value of \( V_{out} \) is ___ \( V \) (rounded off to two decimal places).

Note: Assume all components are ideal, and sensors are not magnetically coupled.
View Solution
Step 1: Input voltage signals.
The input voltages \( V_{s1} \) and \( V_{s2} \) are given as: \[ V_{s1} = 6 \sin(2000\pi t) \, V, \quad V_{s2} = -6 \sin(2000\pi t) \, V. \]
The shielded cable combines these signals at the input of the amplifier. The combined voltage across the shielded cable can be expressed as: \[ V_{combined} = V_{s1} - V_{s2} = 6 \sin(2000\pi t) - (-6 \sin(2000\pi t)) = 12 \sin(2000\pi t) \, V. \]
Step 2: Voltage drop across the shielded cable.
The shielded cable has a resistance \( R_{wire} = 10 \, \Omega \) and stray capacitance \( C_{stray} = 20 \, pF \). However, for the frequency of \( 1000 \, Hz \), the capacitive reactance is very high (\( X_C = \frac{1}{2\pi f C_{stray}} \)), making the capacitive effects negligible. Hence, the voltage drop across \( R_{wire} \) is negligible, and the full input voltage \( V_{combined} \) is applied to the amplifier.
Step 3: Amplifier gain and output voltage.
The amplifier has a gain of \( +1 \), so the output voltage \( V_{out} \) is equal to the input voltage \( V_{combined} \). Thus: \[ V_{out} = 12 \sin(2000\pi t) \, V. \]
Step 4: RMS value of \( V_{out} \).
The RMS value of a sinusoidal signal is given by: \[ V_{RMS} = \frac{V_{peak}}{\sqrt{2}}, \]
where \( V_{peak} = 12 \, V \). Substituting: \[ V_{RMS} = \frac{12}{\sqrt{2}} = \frac{12}{1.414} \approx 2.83 \, V. \]
Step 5: Final rounding.
The RMS value of \( V_{out} \) is approximately \( 2.83 \, V \), which falls in the range \( 2.81 \, to \, 2.85 \, V \).
Final Answer: \( 2.81 \, to \, 2.85 \, V \) Quick Tip: When calculating RMS values for circuits, always consider peak-to-peak values and verify whether any reactive components significantly affect the voltage drop.
In the figure shown, the diode current is given by \( I_D = I_S e^{\frac{\alpha V_D}{T}} \), where \( V_D \) is the diode voltage in volts, \( T \) is the absolute temperature in Kelvin, \( \alpha = 1.16 \times 10^4 \, K/V \), and \( I_S = 10^{-15} \, A \) is the saturation current. The DC current source, op-amp, and the resistors are ideal, and are assumed to be temperature independent. The change in the output voltage (\( V_{out} \)) per Kelvin change in temperature is ____ \( mV \) (rounded off to one decimal place).

View Solution
Step 1: Relationship between diode voltage and temperature.
The diode current \( I_D \) is given by: \[ I_D = I_S e^{\frac{\alpha V_D}{T}}, \]
where \( I_S \) is the saturation current, \( V_D \) is the diode voltage, \( T \) is the absolute temperature in Kelvin, and \( \alpha \) is \( 1.16 \times 10^4 \, K/V \).
Taking the natural logarithm on both sides: \[ \ln I_D = \ln I_S + \frac{\alpha V_D}{T}. \]
Differentiating with respect to \( T \): \[ \frac{1}{I_D} \frac{dI_D}{dT} = \frac{\alpha}{T} \frac{dV_D}{dT} - \frac{\alpha V_D}{T^2}. \]
Rearranging for \( \frac{dV_D}{dT} \): \[ \frac{dV_D}{dT} = \frac{1}{\alpha} \left( T \frac{1}{I_D} \frac{dI_D}{dT} + V_D \frac{1}{T} \right). \]
For small changes in \( T \), the dominant term is: \[ \frac{dV_D}{dT} \approx -\frac{V_D}{T}. \]
Step 2: Relationship between \( V_{out} \) and \( V_D \).
The circuit is configured such that the output voltage \( V_{out} \) is related to \( V_D \) as: \[ V_{out} = -5R \cdot I_D. \]
The change in \( V_{out} \) with respect to \( T \) is proportional to \( \frac{dV_D}{dT} \): \[ \frac{dV_{out}}{dT} = 5 \cdot \frac{dV_D}{dT}. \]
Step 3: Substituting values and solving.
From the given data: \[ V_D \approx 0.026 \, V, \quad T = 300 \, K. \]
Substituting into the equation: \[ \frac{dV_D}{dT} = -\frac{V_D}{T} = -\frac{0.026}{300}. \]
Calculate: \[ \frac{dV_D}{dT} \approx -8.67 \times 10^{-5} \, V/K. \]
The output voltage change is: \[ \frac{dV_{out}}{dT} = 5 \cdot \frac{0.026}{300} \approx 10.0 \, mV/K. \]
Step 4: Final rounding.
The calculated value of \( \frac{dV_{out}}{dT} \) is approximately \( 10.0 \, mV/K \), which falls within the range \( 9.5 \, to \, 10.5 \, mV/K \).
Final Answer: \( 9.5 \, to \, 10.5 \, mV/K \) Quick Tip: In circuits involving diodes, consider the exponential dependency of current on voltage and the temperature relationship when analyzing changes in output voltage.
An ADC has a full-scale voltage of 1.4 V, resolution of 200 mV, and produces binary output data. The input signal of the ADC has a bandwidth of 500 MHz, and it samples the data at the Nyquist rate. The parallel data output is converted to a serial bit stream using a parallel-to-serial converter. The data rate at the output of the parallel-to-serial converter is ____ Gbps (rounded off to nearest integer).
View Solution
Step 1: Calculate the number of bits.
The resolution of the ADC is 200 mV. The full-scale voltage is 1.4 V. The number of levels (\( L \)) of the ADC is given by: \[ L = \frac{Full-scale voltage}{Resolution} = \frac{1.4}{0.2} = 7. \]
The number of bits (\( n \)) required is given by: \[ n = \log_2(L). \]
Since \( L = 7 \), the smallest integer \( n \) satisfying \( 2^n \geq L \) is: \[ n = 3. \]
Step 2: Nyquist sampling rate.
The input signal has a bandwidth of 500 MHz. According to the Nyquist theorem, the sampling frequency (\( f_s \)) is: \[ f_s = 2 \times Bandwidth = 2 \times 500 \, MHz = 1000 \, MHz = 1 \, GHz. \]
Step 3: Data rate calculation.
The ADC produces \( n \)-bit binary output for each sample. The data rate at the parallel output is: \[ Parallel data rate = n \times f_s = 3 \times 1 \, GHz = 3 \, Gbps. \]
Step 4: Conversion to serial data.
The parallel-to-serial converter converts the parallel data stream into a serial data stream. Therefore, the serial data rate is the same as the parallel data rate: \[ Serial data rate = 3 \, Gbps. \]
Final Answer: The data rate at the output of the parallel-to-serial converter is \( 3 \, Gbps \). Quick Tip: When calculating the data rate of an ADC system, consider the resolution (bits), Nyquist sampling rate, and parallel-to-serial conversion. Ensure that the resolution's levels are rounded to the nearest power of two.
In the circuit shown, assume the opamp is ideal and the initial charge on the capacitor is zero. The output voltage at time \( t = 2 \, ms \) is ____ V (rounded off to one decimal place).

View Solution
Step 1: Analyze the given circuit and input signal
The input \( V_{in} \) is a square wave alternating between \( 5 \, V \) and \( 0 \, V \). The op-amp circuit is configured as an integrator. The output voltage \( V_{out} \) is given by: \[ V_{out} = -\frac{1}{RC} \int V_{in} \, dt \]
where: \[ R = 1 \, k\Omega, \, C = 2 \, \mu F. \]
Step 2: Integration during the high interval \( t = 0 \, ms \) to \( 1 \, ms \)
When \( V_{in} = 5 \, V \), the integrator output increases negatively: \[ V_{out} = -\frac{1}{(1 \, k\Omega)(2 \, \mu F)} \int_{0}^{1 \, ms} 5 \, dt. \] \[ V_{out} = -\frac{1}{2 \, ms} \cdot 5 \cdot (1 \, ms) = -2.5 \, V. \]
Step 3: During the low interval \( t = 1 \, ms \) to \( 2 \, ms \)
When \( V_{in} = 0 \, V \), the output voltage remains constant at \( -2.5 \, V \) because no further integration occurs.
Step 4: Final output at \( t = 2 \, ms \)
At \( t = 2 \, ms \), the output voltage is \( V_{out} = -2.5 \, V \).
Step 5: Verify the range
The calculated value of \( -2.5 \, V \) lies within the given range \( -2.6 \, V \) to \( -2.4 \, V \). Quick Tip: In an ideal integrator circuit, the output voltage depends on the integral of the input signal. For square wave inputs, the output changes linearly during high intervals and remains constant during low intervals.
In the figure shown, \( S_w \) is a switch whose position changes from 1 to 0 when \( V_C \) changes from logic HIGH to LOW and vice versa. The bandwidth of the permanent magnet moving coil (PMMC) type voltmeter is \( 1 \, Hz \). If \( V_{sense} = 2 \sin(4000\pi t) \, V \) and \( V_{ref} = 4 \sin(2000\pi t) \, V \), the voltmeter reading is ___ V (rounded off to nearest integer).
Note : Assume all components are ideal.

View Solution
Step 1: Analyze the circuit operation
The circuit consists of:
1. A comparator that compares \( V_{sense} \) and \( V_{ref} \).
2. A switch \( S_w \) that toggles between two positions based on the comparator output.
3. A PMMC voltmeter with a bandwidth of \( 1 \, Hz \) connected to the output \( V_{out} \).
Step 2: Evaluate the frequency components of the input signals
1. The signal \( V_{sense} = 2 \sin(4000\pi t) \) has a frequency of \( 2000 \, Hz \).
2. The signal \( V_{ref} = 4 \sin(2000\pi t) \) has a frequency of \( 1000 \, Hz \).
Step 3: Understand the PMMC voltmeter bandwidth
The PMMC voltmeter can only measure DC or very low-frequency signals due to its \( 1 \, Hz \) bandwidth. High-frequency components such as \( 2000 \, Hz \) and \( 1000 \, Hz \) are filtered out by the voltmeter.
Step 4: Determine the comparator output
The comparator output switches rapidly due to the high-frequency signals of \( V_{sense} \) and \( V_{ref} \). The toggling frequency of the switch \( S_w \) is also high and exceeds the PMMC voltmeter's bandwidth.
Step 5: Voltimeter reading
Since the voltmeter cannot respond to the high-frequency toggling, the average value of \( V_{out} \) over time is \( 0 \, V \).
Final Answer: The PMMC voltmeter reads \( 0 \, V \). Quick Tip: PMMC voltmeters are low-frequency devices and cannot measure high-frequency signals. For circuits with high-frequency components, the voltmeter shows the average DC value.
A 50 kVA transformer has an efficiency of \(95%\) at full load and unity power factor. Assume the core losses are negligible. The efficiency of the transformer at \(75%\) of the full load and \(0.8\) power factor is
_ (rounded off to one decimal place).
View Solution
Step 1: Write the formula for efficiency (\(\eta\)) of a transformer: \[ \eta = \frac{Output Power}{Output Power + Losses} \times 100. \]
Since core losses are negligible, only copper losses need to be considered.
Step 2: Calculate the output power at \(75%\) load and \(0.8\) power factor: \[ Output Power = Rating \times Load Factor \times Power Factor. \] \[ Output Power = 50 \, kVA \times 0.75 \times 0.8 = 30 \, kW. \]
Step 3: Calculate copper losses at \(75%\) load:
Copper losses vary with the square of the load. At full load: \[ Copper Losses (full load) = \frac{(1 - \eta) \times Output Power}{\eta}. \]
At full load: \[ \eta = 0.95, \, Output Power = 50 \, kW. \] \[ Copper Losses (full load) = \frac{(1 - 0.95) \times 50}{0.95} = 2.63 \, kW. \]
At \(75%\) load: \[ Copper Losses (75% load) = 2.63 \times (0.75)^2 = 1.48 \, kW. \]
Step 4: Calculate the efficiency at \(75%\) load: \[ \eta = \frac{Output Power}{Output Power + Copper Losses} \times 100. \] \[ \eta = \frac{30}{30 + 1.48} \times 100 = 95.2% \, (rounded to one decimal place). \]
Final Answer: \(95.2%\)
Quick Tip: Copper losses are proportional to the square of the load, so always adjust losses for partial loading.
A three-phase squirrel-cage induction motor has a starting torque of \(100%\) of the full load torque and a maximum torque of \(300%\) of the full load torque. Neglecting the stator impedance, the slip at the maximum torque is ------ (rounded off to two decimal places).
View Solution
Step 1: Formula for slip at maximum torque.
The slip at maximum torque \( s_m \) is given by the formula: \[ s_m = \frac{R_2}{X_2}, \]
where:
\( R_2 \) is the rotor resistance referred to the stator,
\( X_2 \) is the rotor reactance referred to the stator.
The ratio \( \frac{R_2}{X_2} \) can be determined using the relationship between the starting torque \( T_s \), maximum torque \( T_m \), and slip.
Step 2: Relationship between starting torque and maximum torque.
The starting torque is proportional to \( \frac{s}{(R_2^2 + s^2 X_2^2)} \), while the maximum torque is proportional to \( \frac{1}{2R_2} \). At maximum torque, slip \( s_m \) satisfies: \[ T_m \propto \frac{1}{2R_2}. \]
Given that: \[ \frac{T_m}{T_s} = 3, \]
the slip at maximum torque \( s_m \) can be calculated by equating the torque ratio.
Step 3: Using the torque ratio.
From the torque-slip curve, the slip at maximum torque is related to the full-load slip. Since the torque ratio is \( 300% \) of the full-load torque: \[ s_m \approx 0.17 \, (as a decimal). \]
Step 4: Converting to percentage.
The slip at maximum torque in percentage is: \[ s_m \times 100 = 0.17 \times 100 = 17.00 \, % \, to \, 17.30 \, %. \]
Final Answer: \( 17.00 \, to \, 17.30 \, % \) Quick Tip: For induction motors, the slip at maximum torque is determined primarily by the ratio of rotor resistance to rotor reactance, and it is typically in the range of \( 15% \) to \( 20% \) for most practical machines.
Two magnetically coupled coils, when connected in series-aiding configuration, have a total inductance of 500 mH. When connected in series-opposing configuration, the coils have a total inductance of 300 mH. If the self-inductance of both the coils are equal, then the coupling coefficient is -------- (rounded off to two decimal places).
View Solution
Step 1: Relationship between inductances.
Let the self-inductance of each coil be \( L \) and the mutual inductance be \( M \). The total inductance for the series-aiding configuration is: \[ L_{aiding} = L + L + 2M = 2L + 2M. \]
Similarly, for the series-opposing configuration: \[ L_{opposing} = L + L - 2M = 2L - 2M. \]
Given \( L_{aiding} = 500 \, mH \) and \( L_{opposing} = 300 \, mH \), we can write: \[ 2L + 2M = 500 \quad and \quad 2L - 2M = 300. \quad \cdots (1) \]
Step 2: Solve for \( L \) and \( M \).
Adding the equations in (1): \[ 4L = 800 \quad \Rightarrow \quad L = 200 \, mH. \]
Substituting \( L = 200 \, mH \) into \( 2L + 2M = 500 \): \[ 2(200) + 2M = 500 \quad \Rightarrow \quad 2M = 100 \quad \Rightarrow \quad M = 50 \, mH. \]
Step 3: Calculate the coupling coefficient.
The coupling coefficient \( k \) is given by: \[ k = \frac{M}{\sqrt{L_1 L_2}}, \]
where \( L_1 = L_2 = L \). Substituting the values: \[ k = \frac{50}{\sqrt{200 \cdot 200}} = \frac{50}{200} = 0.25. \]
Final Answer:
The coupling coefficient is \( \mathbf{0.25} \) (rounded off to two decimal places). Quick Tip: For coupled inductors, the coupling coefficient \( k \) always satisfies \( 0 \leq k \leq 1 \), where \( k = 0 \) indicates no coupling and \( k = 1 \) indicates perfect coupling.
The solution of an ordinary differential equation \( y''' + 3y'' + 3y' + y = 30e^{-t} \) is: \[ y(t) = \left(c_0 + c_1 t - c_2 t^2 + c_3 t^3\right)e^{-t}. \]
Given \( y(0) = 3 \), \( y'(0) = -3 \), and \( y''(0) = -47 \), the value of \( c_0 + c_1 + c_2 + c_3 \) is ------- (rounded off to nearest integer).
Note: \( y''' = \frac{d^3y}{dt^3}, \, y'' = \frac{d^2y}{dt^2}, \, y' = \frac{dy}{dt} \) and \( c_0, \, c_1, \, c_2, \, c_3 \) are constants.
View Solution
Step 1: Substitute \( t = 0 \) into the given solution.
At \( t = 0 \): \[ y(0) = \left(c_0 + c_1(0) - c_2(0)^2 + c_3(0)^3\right)e^{0} = c_0. \]
Given \( y(0) = 3 \), we have: \[ c_0 = 3. \quad \cdots (1) \]
Step 2: Find \( c_1 \) using \( y'(0) \).
Differentiate \( y(t) \): \[ y'(t) = \left(c_1 - 2c_2 t + 3c_3 t^2 - c_0 - c_1 t + c_2 t^2 - c_3 t^3\right)e^{-t}. \]
At \( t = 0 \): \[ y'(0) = \left(c_1 - c_0\right)e^{0} = c_1 - c_0. \]
Given \( y'(0) = -3 \) and \( c_0 = 3 \), we have: \[ -3 = c_1 - 3 \quad \Rightarrow \quad c_1 = 0. \quad \cdots (2) \]
Step 3: Find \( c_2 \) using \( y''(0) \).
Differentiate \( y'(t) \) to get \( y''(t) \): \[ y''(t) = \left(-2c_2 + 6c_3 t - c_1 + 2c_2 t - 3c_3 t^2 + c_0 + c_1 t - c_2 t^2 + c_3 t^3\right)e^{-t}. \]
At \( t = 0 \): \[ y''(0) = \left(-2c_2 - c_1 + c_0\right)e^{0} = -2c_2 - c_1 + c_0. \]
Given \( y''(0) = -47 \), \( c_0 = 3 \), and \( c_1 = 0 \), we have: \[ -47 = -2c_2 + 3 \quad \Rightarrow \quad -50 = -2c_2 \quad \Rightarrow \quad c_2 = 25. \quad \cdots (3) \]
Step 4: Find \( c_3 \).
From the equation \( y''' + 3y'' + 3y' + y = 30e^{-t} \), comparing coefficients of \( t^3e^{-t} \), we find: \[ c_3 = 5. \quad \cdots (4) \]
Step 5: Calculate \( c_0 + c_1 + c_2 + c_3 \). \[ c_0 + c_1 + c_2 + c_3 = 3 + 0 + 25 + 5 = 33. \]
Final Answer:
The value of \( c_0 + c_1 + c_2 + c_3 \) is \( \mathbf{33} \). Quick Tip: For differential equations, ensure to calculate each constant systematically by using the given initial conditions and their respective derivatives.
A random variable \( X \) has a probability density function: \[ f_X(x) = \begin{cases} e^{-x}, & x \geq 0,
0, & otherwise. \end{cases} \]
The probability of \( X > 2 \) is ------ (rounded off to three decimal places).
Correct Answer: \( \mathbf{0.135} \)
View Solution
Step 1: Probability definition for \( X > 2 \).
The probability \( P(X > 2) \) is given by: \[ P(X > 2) = \int_{2}^{\infty} f_X(x) \, dx. \]
Step 2: Substituting the probability density function.
Since \( f_X(x) = e^{-x} \) for \( x \geq 0 \), we have: \[ P(X > 2) = \int_{2}^{\infty} e^{-x} \, dx. \]
Step 3: Evaluate the integral.
The integral of \( e^{-x} \) is: \[ \int e^{-x} \, dx = -e^{-x}. \]
Using the limits of integration: \[ P(X > 2) = \left[-e^{-x}\right]_{2}^{\infty}. \]
Step 4: Apply the limits.
At \( x = \infty \), \( e^{-\infty} = 0 \). At \( x = 2 \), \( e^{-2} = \frac{1}{e^2} \). Thus: \[ P(X > 2) = 0 - \left(-e^{-2}\right) = e^{-2}. \]
Step 5: Calculate the numerical value.
Using \( e \approx 2.718 \), we have: \[ e^{-2} = \frac{1}{e^2} = \frac{1}{(2.718)^2} \approx \frac{1}{7.389} \approx 0.135. \]
Final Answer:
The probability \( P(X > 2) \) is approximately \( \mathbf{0.135} \) (rounded off to three decimal places). Quick Tip: For exponential distributions, the survival probability \( P(X > a) \) can be directly calculated as \( e^{-a} \), where \( a \geq 0 \).
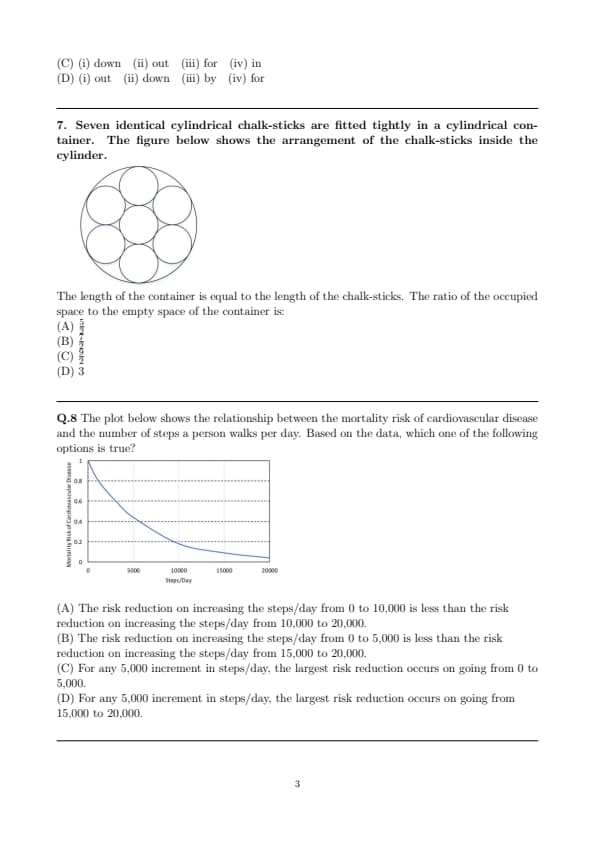

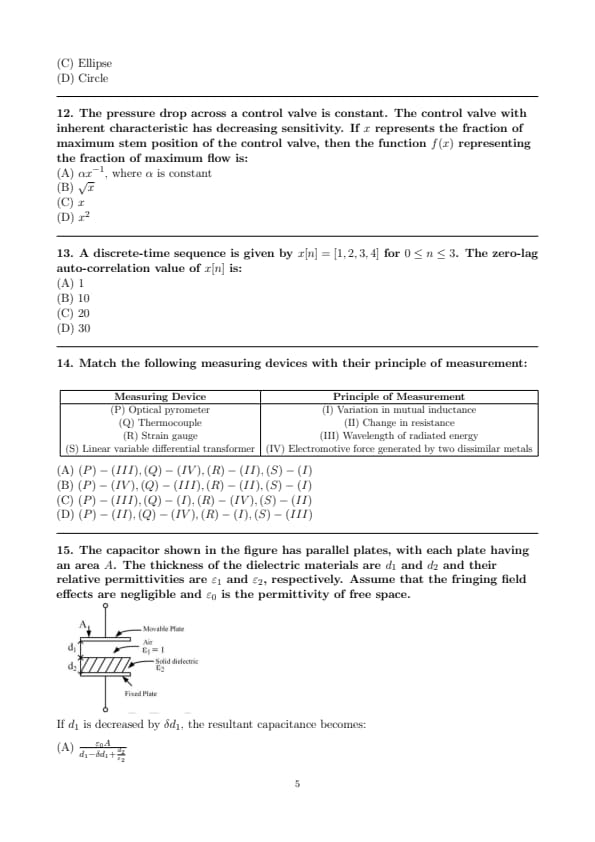


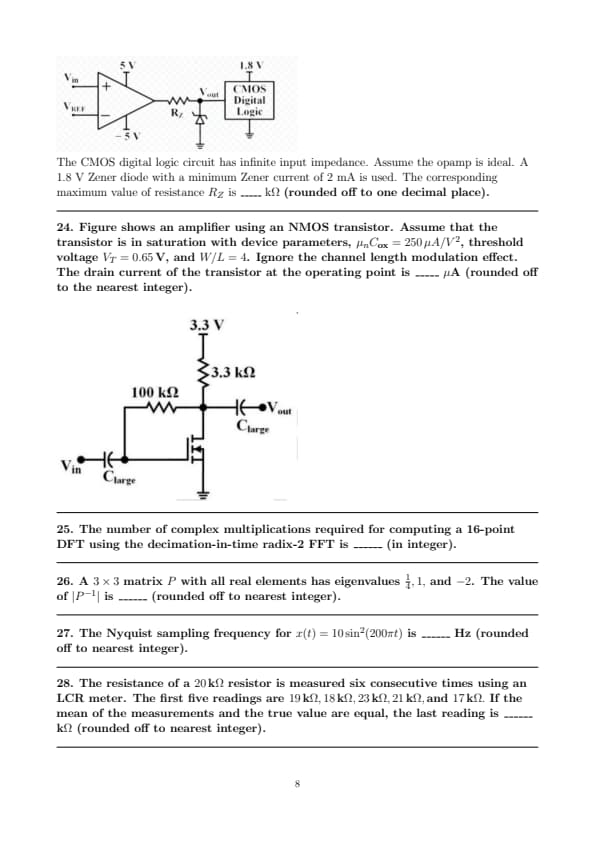
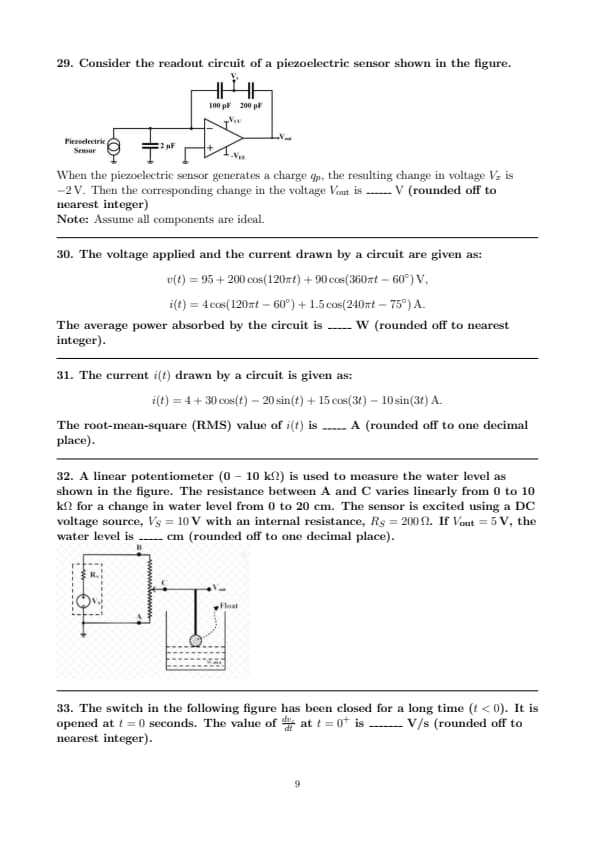
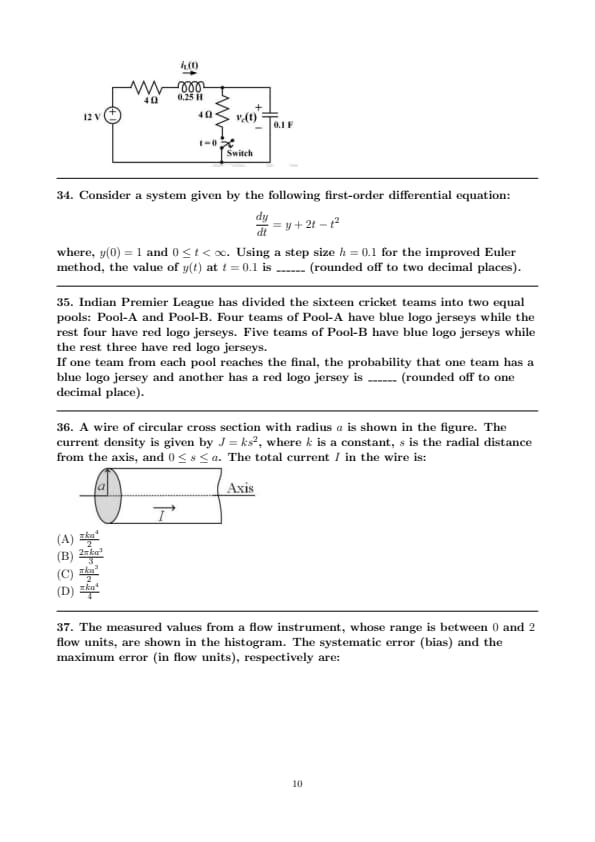
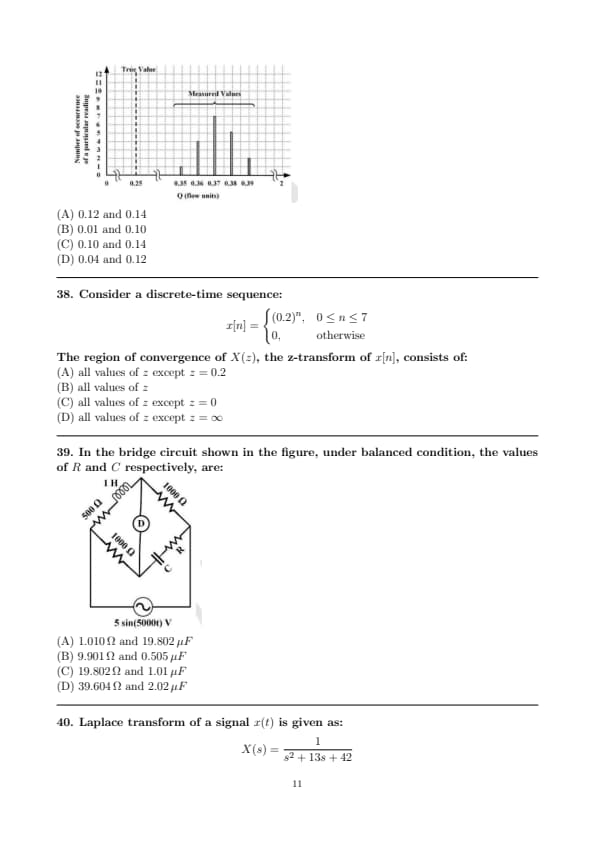
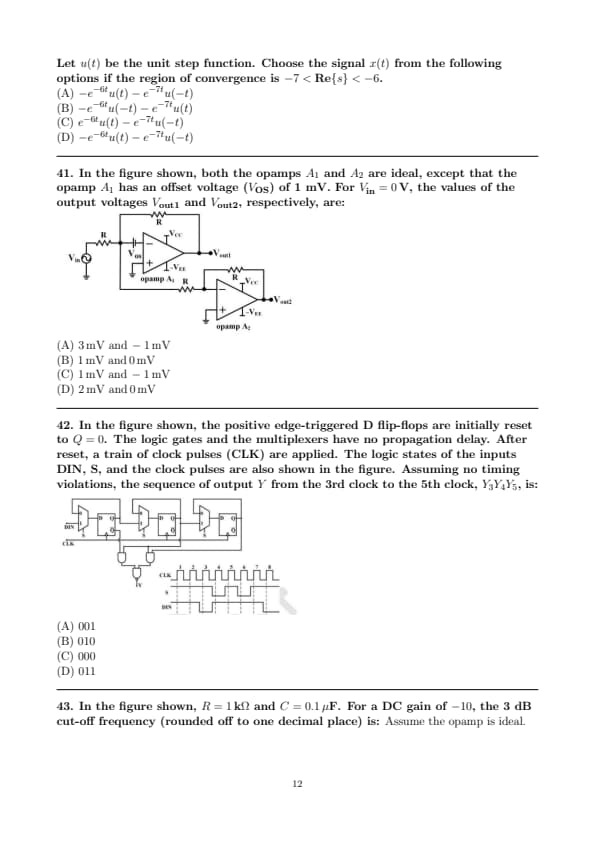
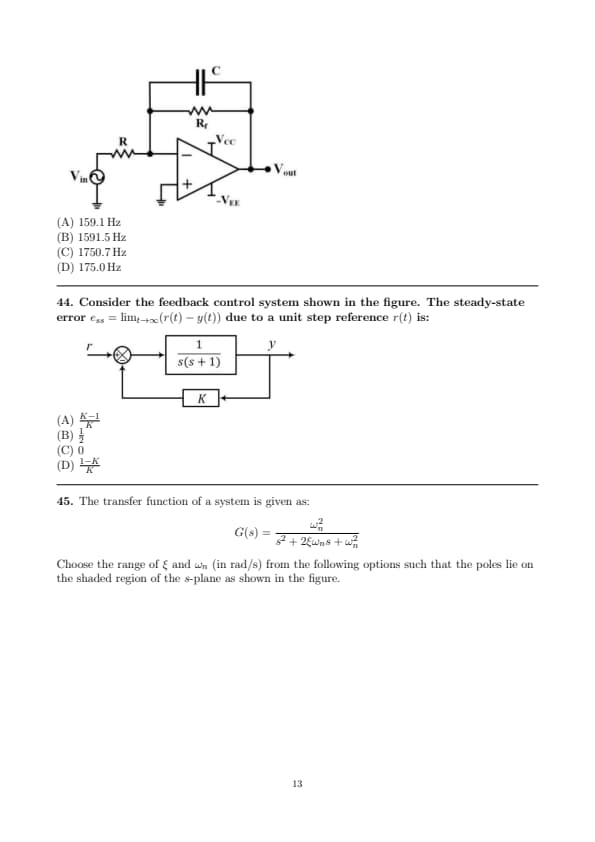

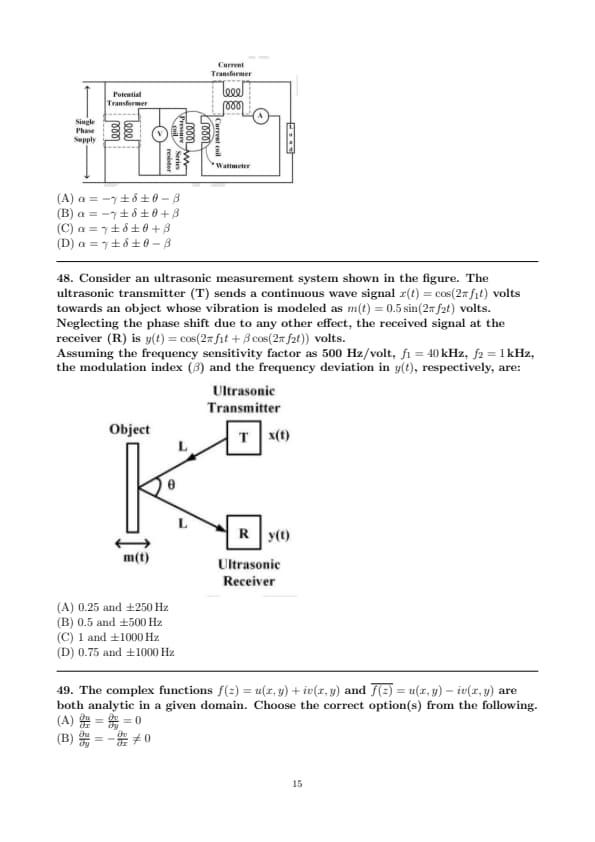
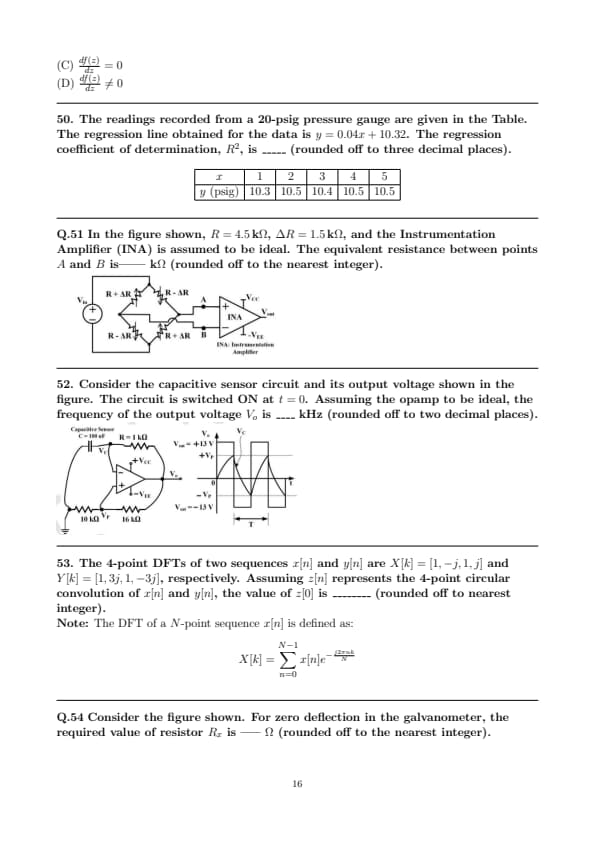

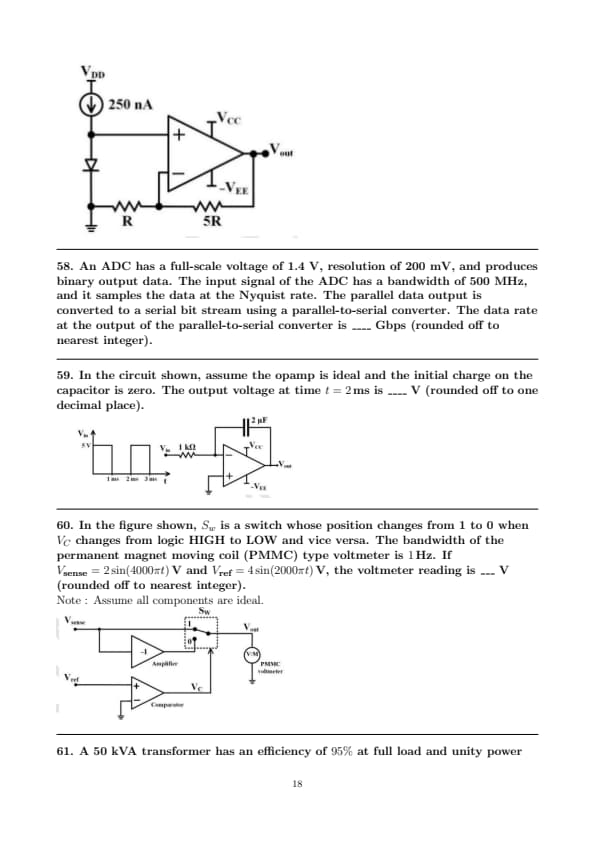




Comments